|
1 ACM6753 I2C控制模式注意点
很多带电池的便携式产品由于本身有个小MCU在系统上,为了更加灵活的做一些策略性的电机控制,采用I2C 控制的方式来利用ACM6753进行电机的调速、正反转以及刹车控制等.
ACM6753上电默认是外部SPEED管脚模拟电压调速模式,当SPEED管脚(pin 5)外部电压不为零时,上电后 ACM6753检测到该管脚电压为非零值就会认为收到调速指令,但是此时电机参数还没有通过I2C指令配置进来,必 然会产生失步错误,从而停留在这个错误报警状态长达5秒钟, 造成较长的启动延时. 因此在使用I2C控制ACM6753 时要么“避免在初始化之前SPEED管脚为非零值(>0.2V)”, 要么“在ACM6753上电后 300ms以内迅速用I2C指令将 速度配置为0,然后开始初始化电机相关参数” .
通常电池类便携产品设计往往追求低功耗, ACM6753提供业界有竞争力的低功耗性能. 在休眠模式下,VCC上电 流不到20uA; 在待机模式下,VCC上电流不到150uA. 后面详细描述两种模式下的I2C控制策略

2 待机模式 (Standby Mode)
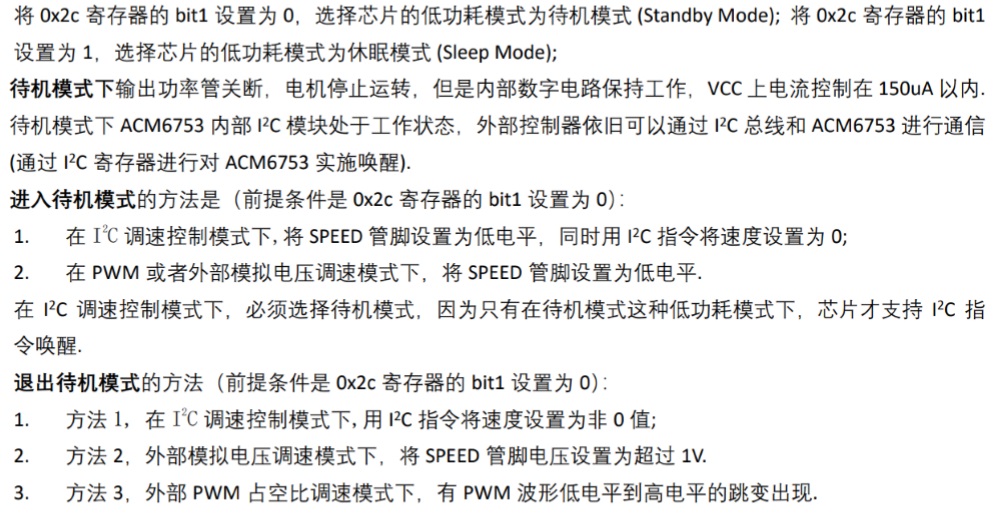
如果对功耗不是追求极致,可以接受150uA的待机电流,可以用待机模式,建议“SPEED管脚下拉到地”, 所有调速/方向控制/刹车控制都由I2C控制.
3 休眠模式 (Sleep Mode)
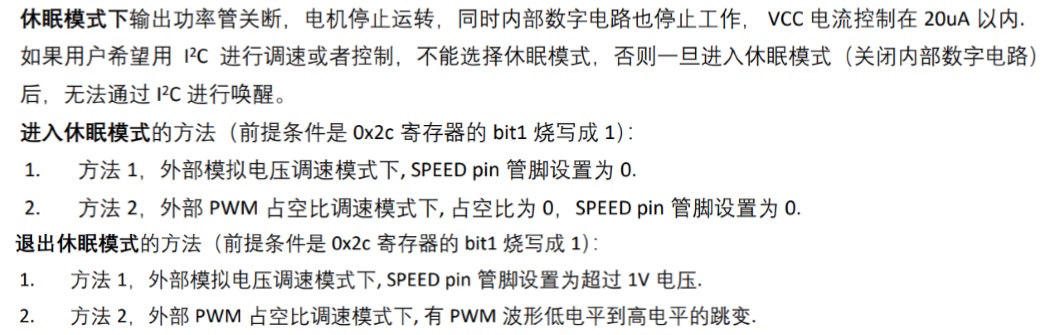
以上都是硬件(程序烧写固化)模式下的休眠模式操作方法. 如果客户想用I2C控制,同时又想用休眠模式, 具 体方法如下:
1) 第一次上电→Speed管脚 (pin5)设置为高电平→300ms以内用I2C命令将速度设置为0(通过 0x01和0x02寄存器)→然后初始化其他电机运转参数相关寄存器,同时将0x2c寄存器的bit1设 置为1→设置目标转速以及正反转/刹车等;
2) 进入休眠模式. 将Speed管脚设置为低电平, 进入休眠模式.
3) 下一次退出休眠模式. Speed管脚 (pin5)重新设置为高电平→300ms以内用I2C命令将速度设置 为0(通过0x01和0x02寄存器)→然后初始化其他电机运转参数相关寄存器,同时将0x2c寄存 器的bit1设置为1→设置目标转速以及正反转/刹车等;
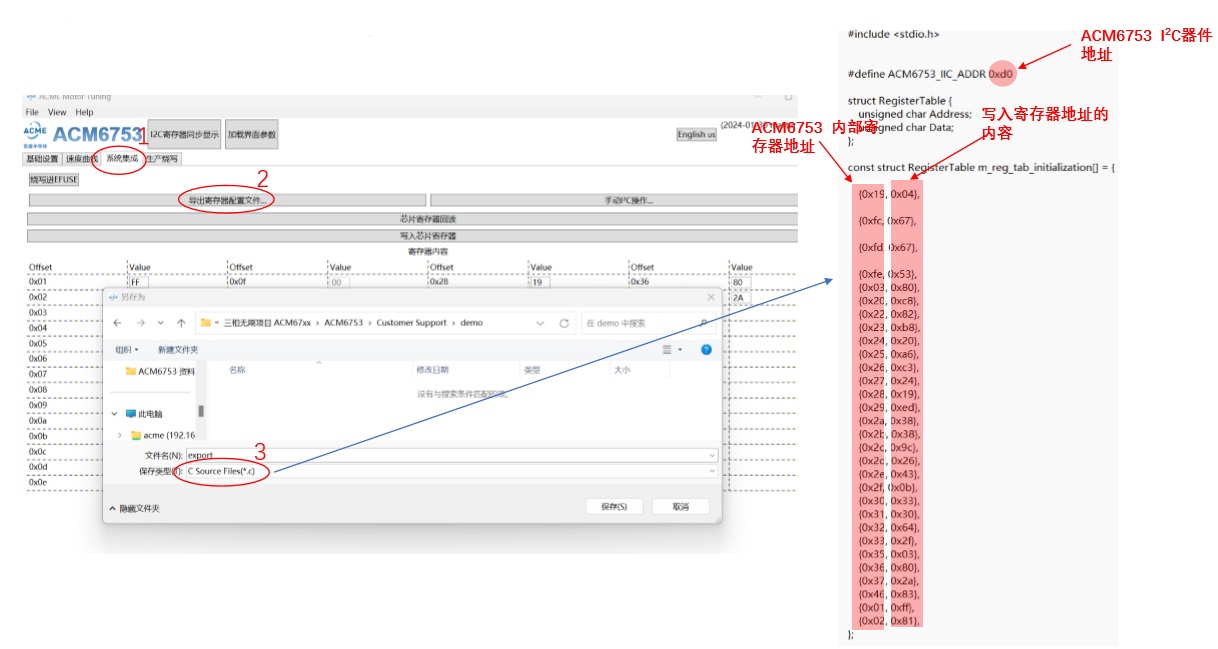
4 如何生成初始化脚
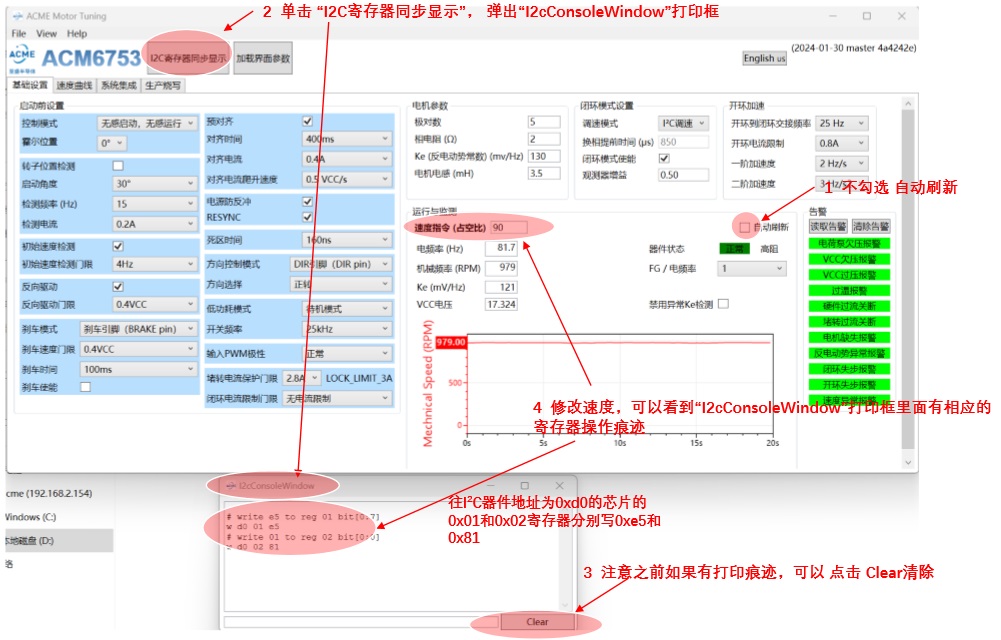
5 如何快速知道某项操作该操作哪个寄存器
|


