|
BLDC��ɶ��
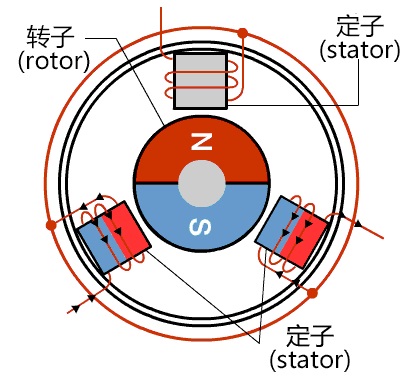
1��BLDC�׳���ˢֱ��������ص����û�л����������Ķ�����ͭ���Ƴɵ���Ȧ��ת���������塣
2��BLDC���ƣ�Ҳ�������dz�˵�ķ������Ʒ�����Ϊ�и��У��и�������ǻ������ű�����������õ��Ƿ��綯�ƹ۲⡣
��������
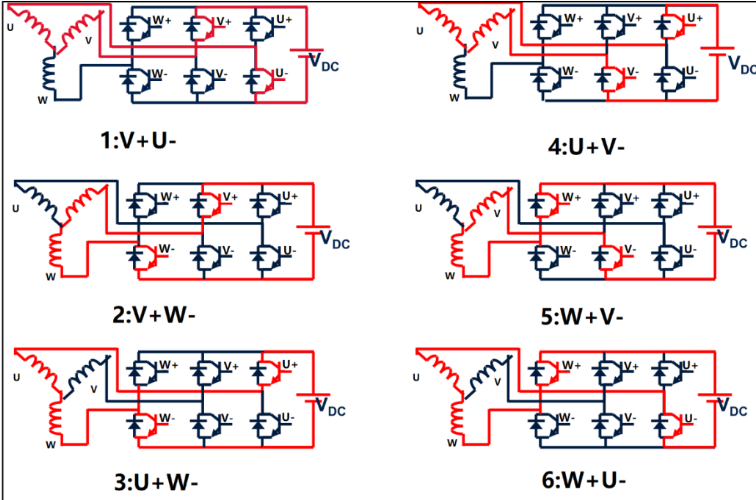
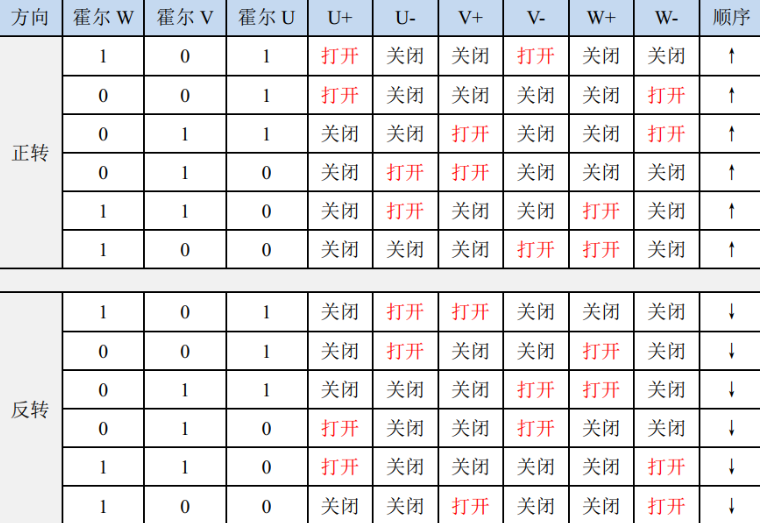
��������ÿ��ֻ��������������ͨ�磬һ�����ա�
Ϊ�˷�ֹ��·�������������ʹܿɲ���ͬʱ��
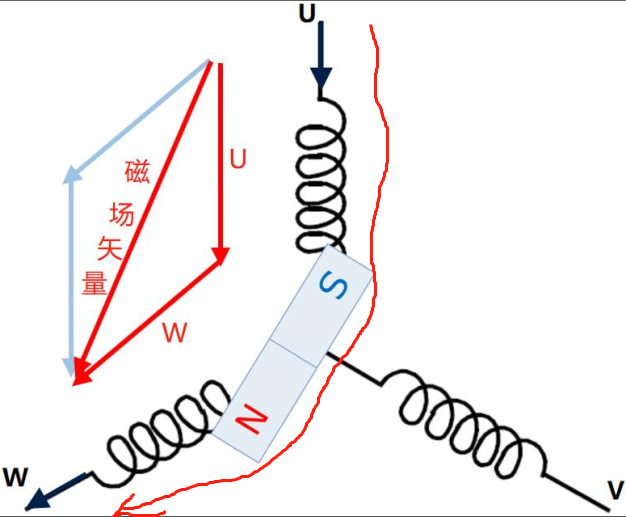
�����֮��Ĵų�����
�������ֶ���ͨ��ĵ�������Ĵų��������֪������U-W��ͨʱ��������Ȧ�����Ĵų����кϳɣ����Ǵų�ʸ����������֮�䣬����ͬ����⣬����������ԭ����
�����������ϣ�
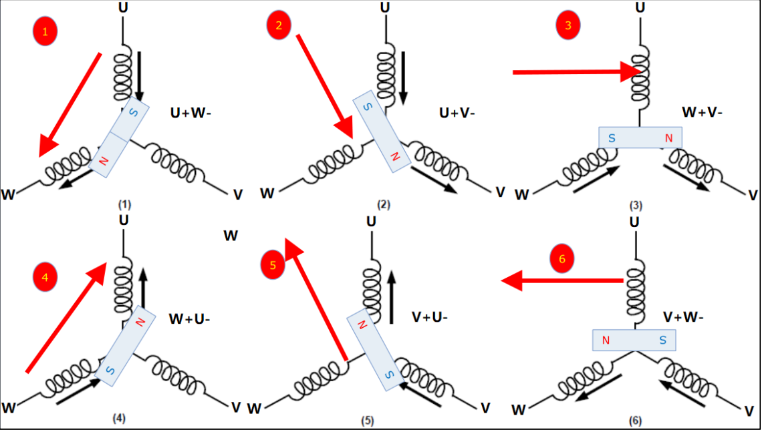
��Ӧ�������ࣺ
�������ת
˳ʱ�����ǽ���������ʱ�����ǽз�ת
V+U- W+U- W+V- U+V- U+W- V+W- ����һ���ص㣺����UVW���˳��仯������ת��W+ W+ U+ U+ V+ V+����Ҳ�������ġ�

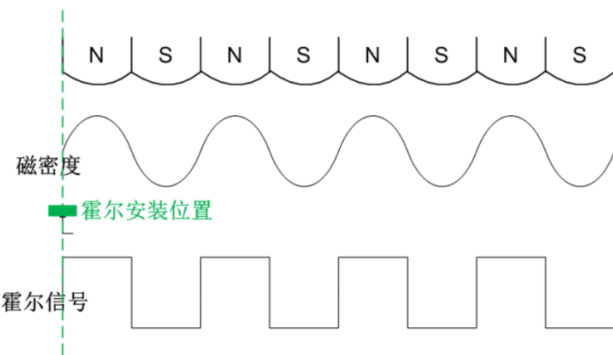
��������BLDC
��������һ��λ�ü������ã������ǵ�ת��ת���ĸ������ˡ�
����ԭ����������Ԫ��
���Ե�ת����ת��ʱ�������������ô�䣺
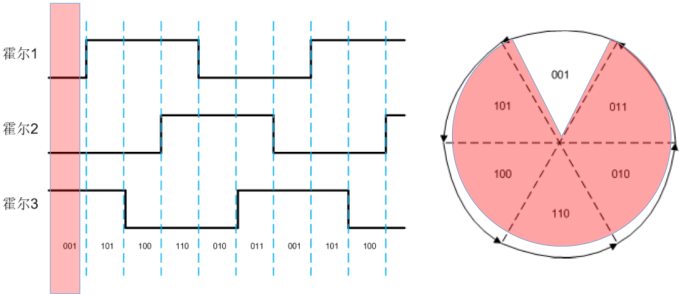
�������120��ڷŵ�3������Ԫ����������Ӧ����ֻ��һ����������
��Ӧ��ת��ת��
546231˳����ʲô����
��ɲ���������������
��ʵ����������Ƕ�Ҫͨ�������Ե�����п��Ƶġ�
3��������ɵ���һ��3bits���Ķ���������101��001��011����
�������Ǿ���������ļ��裺����������Uֵ��bit2��λ��Vֵ��bit1��Wֵ��bit0
��Ӧ�����ǿ������һ������ֵ��

��546231����������ʱ��Ӧ�Ļ���ֵ��
����ֵ������ʵ����ʲôҪע��ģ�
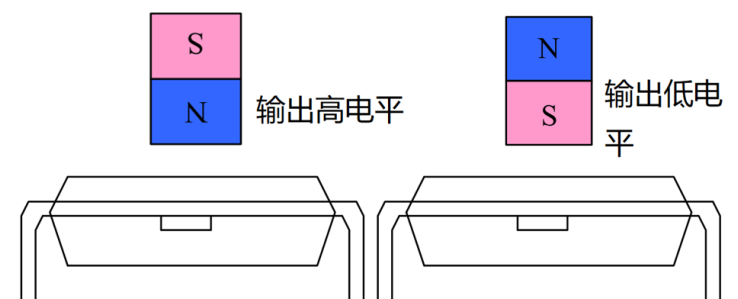
�������������ߵ͵�ƽ�ź���ص���ʲôʱ������ֵ��
��������ж������Ϊʲô���ʾ���ʵʱ�ԣ��ر���ת�����ߵ�ʱ��������������������ݣ����»����ʱ��ת���ϲ�ȥ������
HallDate = 0;
HallDate = U<<2|V<<1|W<<0;
����������λ��ɵ����㣬��Ҫ�üӼ��˳�����C��λ���������ġ�
���ʱ���������HallDate��һ��0-7��������ô����0��7��
0��ζ��û��������ֵ��7��ζ�Ż���ֵ�ܵ��˸��ţ��������dz����⣬�Ͻ���飡
��������·�İ�����ɶ
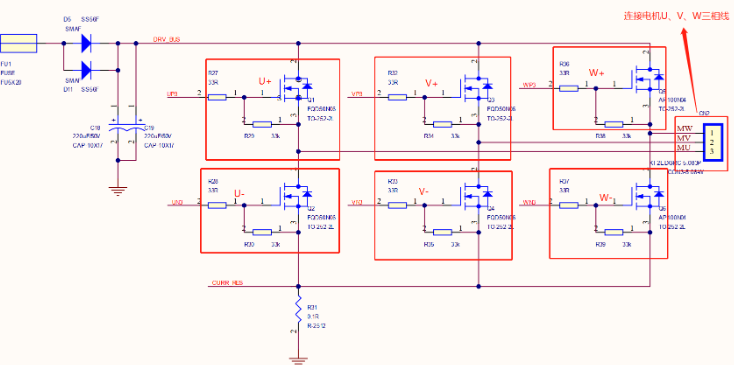
ע���ˣ����Ų���ָ�������������ʹܣ�����UVW�������ţ�U+U-������һ�����š�
���dz�˵�� ���ű۵�ͨ ���� ���ű۵�ͨ һ����ָijһ�����ŵġ�
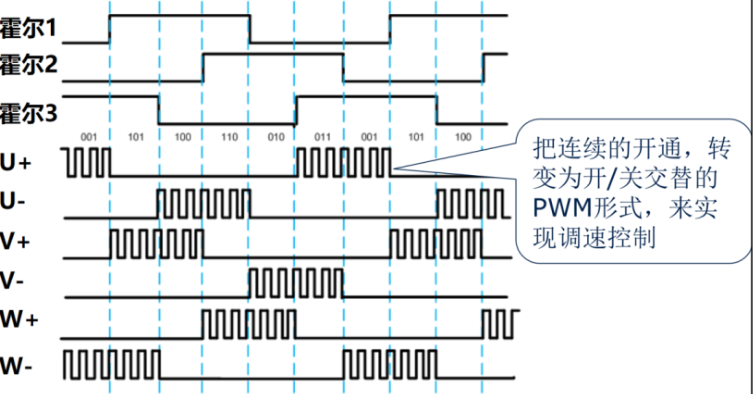
Ϊɶ��PWM��
������������⣬ֻҪ��֤���ʹ������ű۴����ˣ���ô������PWM���أ�
��Ϊ������ֱ�Ӱѵ�Դ���ص���Ȧ�ϣ�Ȼ����������һ��ʱ�䣬��ᵼ�µ���������Ժܸߵ��ٶȿ�쭣��̸�ο��ƣ�
�������ǾͰѳ����ĸߵ͵�ƽ�滻��PWM����PWM�����ƣ��ܷ���Ŀ�����Ȧ�ĵ�������������ת��Ť�ػ���ת�٣�ͨ������ռ�ձȣ���
������PWM���ڷ�ʽ
���ǿ����˴����ʱ��������ʲôH_ON-L_PWM��H_PWM-L_ON����
������ɶ��
��ʵ����PWM���ڷ�ʽ�����治��˵��Ҫ�Ե�����и��õĿ��ƣ�Ȼ�������PWM����PWM���ڵķ�ʽҲ�кö��֡�
��������Ӧ����5�֣�������ֻ˵���������
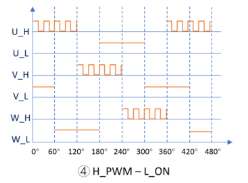
H_ON �C L_PWM��ijһ���ϰ���ʼ�ձ��ָߵ�ƽ��Ҳ�����ϰ��ų�����ͨ������һ���°���ʼ����PWM��ʽ����
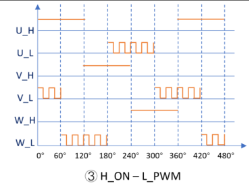
H_PWM �C L_ON�� ijһ���ϰ���ʼ����PWM��ʽ���ƣ���һ���°���ʼ�ձ��ָߵ�ƽ��Ҳ�����°��ų�����ͨ��
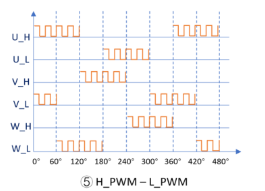
H_PWM �C L_PWM���ϰ��ź��°��Ŷ�����PWM��ʽ���ƣ����ֿ��Ʊ������������������ڻ����˲����ܵ��¶�·��
ע��PWM��Ƶ�ʾ���������20K���ң�һ����Ϊ���ʹ����ƣ���ʮ����ߴ�г���ĸ��š�
BLDC����ȱ��
1 �������Ʒ���������Ĵ���Ϊ�����Ǻ͵���ƽ�������ȵģ�����������������ֻ�п�������״̬����Ȧ������������ֵ�����ܴ�
2 �����Ĵų�������������Ծ�ģ���ɺܴ��ת������������������������ʹ����оƬ���ߴ����������½���
��ȻҲ�кô���Ӳ���ɱ��͡������㷨��
��������������������������������
��Ȩ����������Ϊ����ԭ�����£���ѭ CC 4.0 BY-SA ��ȨЭ�飬ת���븽��ԭ�ij������Ӻͱ�������
ԭ�����ӣ�https://blog.csdn.net/weixin_43824188/article/details/129547019
|