|
电机控制在实现这些承诺方面发挥着主要作用,理解基本原理是实现目标的第一步。无刷直流(BLDC)电机管理的电机控制的关键要素,以及它如何在降低成本、节省空间和提高性能的同时提高效率。
1、不同的电机类型
有几种类型的电机控制拓扑可用:有刷、无刷直流(BLDC)、步进和感应。两种最密切相关的无刷电机类型是BLDC和永磁同步电机(PMSM)。
无刷电机在当今的许多应用中变得非常流行,因为它们消除了对电机电刷的需要。这些BLDC拓扑使用换向逻辑来移动转子,使其更加高效和可靠。
有刷电机的换向由电刷/换向器接口产生。该界面会导致摩擦和电弧,随着时间的推移会降低电刷的性能。这种摩擦会产生热量并缩短电机寿命。
与有刷电机相比,BLDC电机具有许多优点。它们节能、更小、更轻、更安静、更可靠且更耐用。此外,它们提供精确的速度控制,更适合变速应用。
2、了解BLDC和PMSM型电机
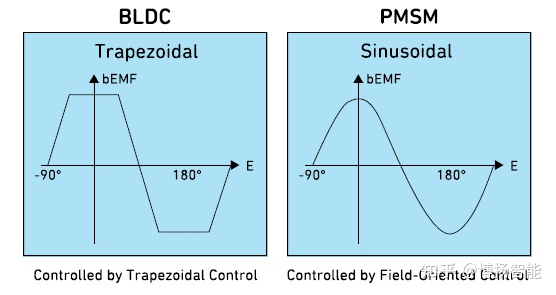
BLDC和PMSM电机根据同步电机的原理工作。转子在每次换向时继续追逐定子,因此电机连续运动。然而,这两种直流电机的定子绕组具有不同的几何形状,因此它们会产生不同的反电动势(BEMF)响应。BLDC BEFM是梯形的。PMSM电机具有正弦BEMF,因此线圈绕组以正弦方式缠绕。为了最大限度地提高性能,这些电机通常使用正弦波换向。
BLDC和PMSM电机在运行时通过其绕组产生BEMF。在任何电机中,由于运动,产生的电动势称为反电动势(BEMF),因为电机中感应的电动势与发电机的电动势相反。
3、磁场定向控制的解释
要获得控制PMSM电机的正弦波形,需要磁场定向控制(FOC)算法。FOC通常用于最大限度地提高PMSM三相电机的效率。PMSM的正弦控制器比BLDC梯形控制器更复杂、成本更高。然而,这种成本增加带来的优点是电流波形中的噪声更低和谐波更少。BLDC的主要优点是更易于控制。最终,选择哪种电机最好取决于其应用。
4、带传感器和无传感器的BLDC和PMSM电机
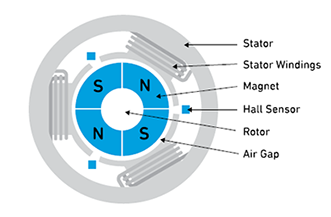
BLDC和PMSM电机可以是带传感器或无传感器的。带传感器的电机用于需要电机在负载条件下启动的应用。他们使用嵌入电机定子中的霍尔传感器。传感器本质上是一个开关,其数字输出等于感测到的磁场极性。电机的每相都需要一个单独的霍尔传感器。因此,三相电机需要三个霍尔传感器。无传感器电机需要算法来使用电机作为传感器进行操作。他们依赖于BEMF信息。通过对BEMF进行采样,可以推断出转子位置,从而无需使用基于硬件的传感器。无论电机拓扑结构如何,控制这些机器都需要知道转子位置,以便可以有效地换向电机。
5、电机控制软件算法
软件算法(即设计用于执行特定任务的一组指令),如计算机程序,用于控制BLDC和PMSM电机。这些软件算法通过监视和控制电机运行来提高效率并降低运营成本。算法的一些主要功能是电机初始化、霍尔传感器转子位置检测以及用于增加或减少电流参考的开关信号检查。
6、控制器如何处理电机传感器信息
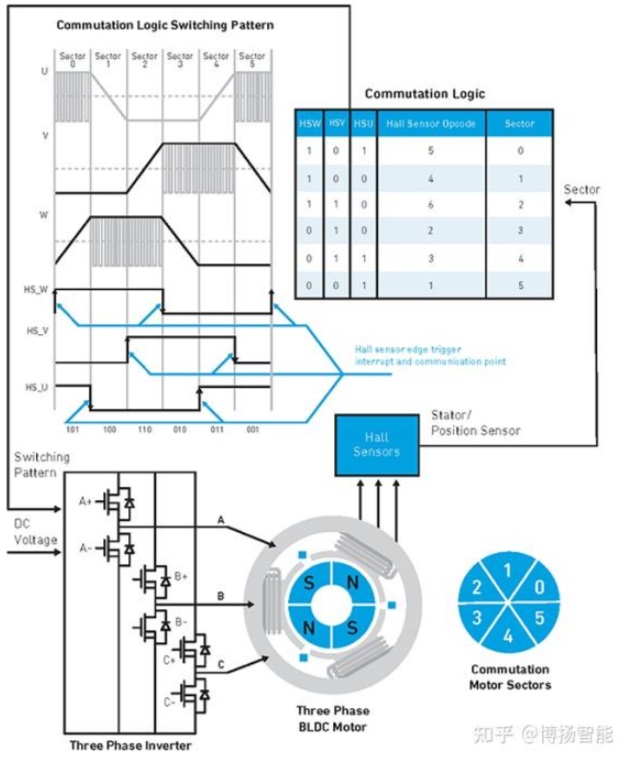
三相BLDC电机有六个状态。如下图所示,三位代码可用于表示1到6之间的操作码编号。放置传感器以使用八个操作码中的六个(1到6)提供三位数据输出。此信息很有用,因为控制器可以确定何时发出了非法操作码并根据合法操作码(1到6)采取行动。如下所示,该算法获取霍尔传感器操作码并对其进行解码。当霍尔传感器操作码的值发生变化时,控制器改变通电方案以实现换向。微控制器使用操作码从查找表中提取通电信息。在三相逆变器用新的扇区命令通电后,磁场移动到新的位置,推动转子随之移动。
|