|
无刷直流电机介绍
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。早在十九纪诞生电机的时候,产生的实用性电机就是无刷形式,即交流鼠笼式异步电动机,这种电动机得到了广泛的应用。但是,异步电动机有许多无法克服的缺陷,以致电机技术发展缓慢。上世纪中叶诞生了晶体管,因而采用晶体管换向电路代替电刷与换向器的直流无刷电机就应运而生了。这种新型无刷电机称为电子换向式直流电机,它克服了第一代无刷电机的缺陷。
无刷直流电机工作原理
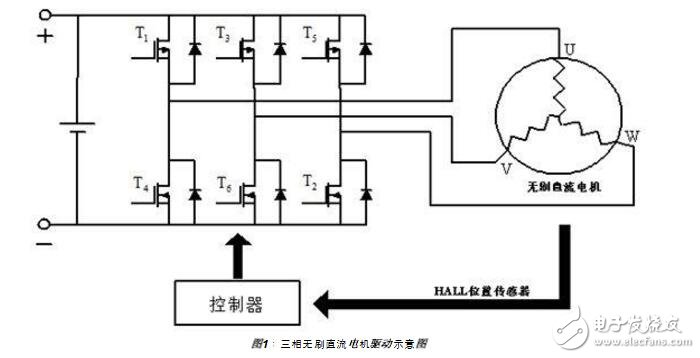
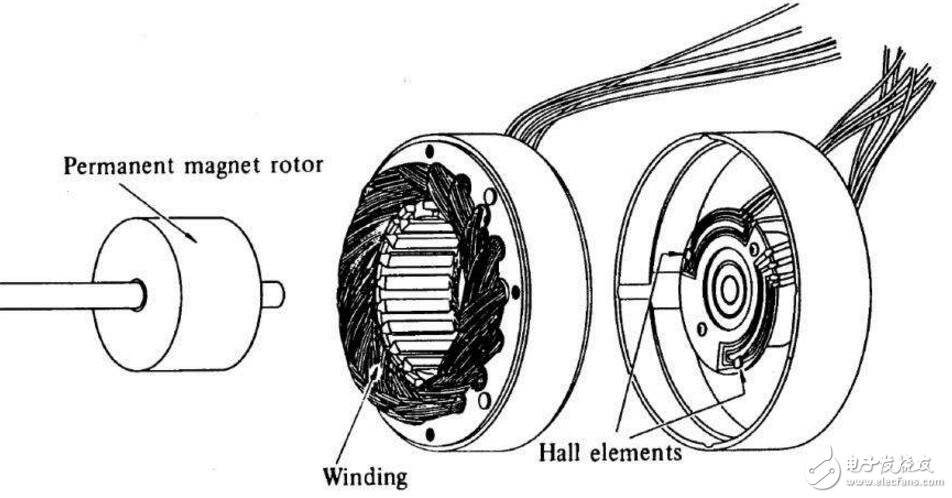
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体 ,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
直流电机具有响应快速、较大的起动转矩、从零转速至额定转速具备可提供额定转矩的性能,但直流电机的优点也正是它的缺点,因为直流电机要产生额定负载下恒定转矩的性能,则电枢磁场与转子磁场须恒维持90°,这就要藉由碳刷及整流子。碳刷及整流子在电机转动时会产生火花、碳粉因此除了会造成组件损坏之外,使用场合也受到限制。交流电机没有碳刷及整流子,免维护、坚固、应用广,但特性上若要达到相当于直流电机的性能须用复杂控制技术才能达到。现今半导体发展迅速功率组件切换频率加快许多,提升驱动电机的性能。微处理机速度亦越来越快,可实现将交流电机控制置于一旋转的两轴直角坐标系统中,适当控制交流电机在两轴电流分量,达到类似直流电机控制并有与直流电机相当的性能。
无刷直流电机特点:
1、可替代直流电机调速、变频器+变频电机调速、异步电机+减速机调速;
2、具有传统直流电机的优点,同时又取消了碳刷、滑环结构;
3、可以低速大功率运行,可以省去减速机直接驱动大的负载;
4、体积小、重量轻、出力大;
5、转矩特性优异,中、低速转矩性能好,启动转矩大,启动电流小;
6、无级调速,调速范围广,过载能力强;
7、软启软停、制动特性好,可省去原有的机械制动或电磁制动装置;
8、效率高,电机本身没有励磁损耗和碳刷损耗,消除了多级减速耗,综合节电率可达20%~60%。
9、可靠性高,稳定性好,适应性强,维修与保养简单;
10、耐颠簸震动,噪音低,震动小,运转平滑,寿命长;
11、不产生火花,特别适合爆炸性场所,有防爆型;
12、根据需要可选梯形波磁场电机和正弦波磁场电机。
无刷直流电机的PWM调制方式介绍
图1为三相无刷直流电机的驱动部分示意图,主要包括霍尔信息的采集,以及根据霍尔信号对三相逆变器做对应的调制,三相逆变器PWM的开关顺序已经PWM的占空比是调制的主要内容,不同的调制方式对BLDC的运行性能有很大影响,近年来随着电机控制系统越来越精细,在原来常见的方波120度脉宽调制基础上,正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)出现,使电机脉动降低、电流波形畸变减小,但后两者的算法比较复杂,本文将对三种调制方式逐一地介绍其特性、原理及计算细节。安森美半导体LC08000M芯片集成这三种调制方式,适合应用在BLDC的驱动。
1. 方波120度脉宽调制
利用霍尔值(每个电气周期6次变化),改变UVW相电流流向,但同一霍尔值内电流流向不变,任何时刻只能一相的上桥和另一相的下桥导通,这种控制方式简单,但存在最大60度的转矩偏角,效率降低,同时会伴有转动噪音。
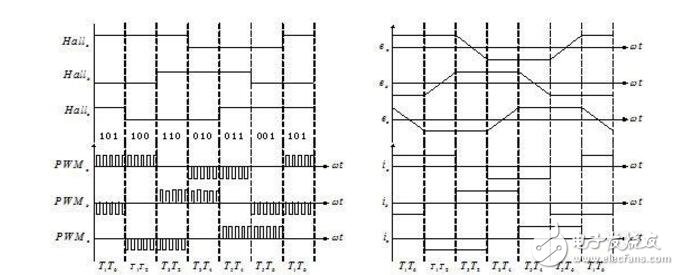
图2: Hall状态与PWM、三相反电动势、三相电流的对应关系
在上桥下桥PWM开关控制顺序不同,我们可以做出下面5种模式的选装。
LC08000M为了减小在换相时转矩的波动,采用了PWM值过渡方式,这一处理能有效降低了转动噪音。
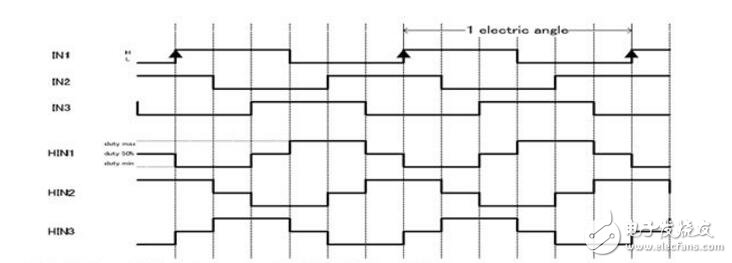
图3:LC08000M 方波120°脉宽调制的PWM与霍尔关系的对应图
2. 正弦脉宽调制(SPWM)
叠加在MOS管的直流电压可以通过PWM开关控制来等效成正弦电压,由于中性点为0,因此电机的相电压也为正弦,从而使得电机相线电流也成正弦变化规则,消除了转矩波动。根据面积等效原理,正弦波还可以等效成PWM波。
如图5所示,通过这种方式我们不停的调整PWM的占空比来实现正弦电压效应。
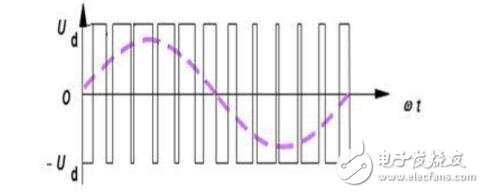
图3:正弦波与PWM波的等效图
正弦脉宽调制需要知道ωt的详细值,而我们从$霍尔元件只可以读取到60°120°180°240°360°这个6个大体的位置信息,所以我们需要从前几次霍尔值变化的间隔时间推算出60度内的内角度。在电机静启动情况下,我们无法推算出内角度信息,因此启动情况下,我们还是要采用方波120度脉宽调制方式启动,但电机得到一个稳定转动后,我们可以推算出内角度,就可以切换成正弦脉宽调制方式。
推算内角度方法:如图6-1首先计算出每个60°需要的时间,除以PWM周期的时间可以计算出60°内PWM的次数,从而得到60°内每增加1个PWM时内角度增加的值,在加上通过霍尔值对应的大角度值就得到当前的角度;UVW三相彼此相差120°相位。

|