|
作者:Jeff Smoot 是 CUI Devices 应用工程和运动控制部门副总裁
无刷直流 (BLDC) 电机是一种采用直流电源并通过外部电机控制器控制实现电子换向的电机。不同于有刷电机,BLDC 依靠外部控制器实现换向,也就是在电机相上切换电流以产生运动的过程。有刷电机具有实际的电刷,其每旋转一圈可实现两次换向过程,而 BLDC 电机则无电刷。由于自身的设计特性,无刷电机能够实现任意数量的换向磁极对。本文将回顾 BLDC 电机的基础知识,探讨其常见换向方法并介绍一种采集位置反馈信息的新解决方案。
BLDC 电动机换向的基础知识
最常见的 BLDC 电机采用 3 相配置。相数与定子绕组数相匹配,而转子磁极数根据应用需求的不同可以是任意数量对。因为 BLDC 电机的转子受旋转的定子磁极影响,所以须追踪定子磁极位置,以有效驱动三个电机相。为此,需使用电机控制器在三个电机相上生成六步换向模式。这六步(或换向相)移动电磁场,进而使转子永磁体推动电机轴(图 1)。
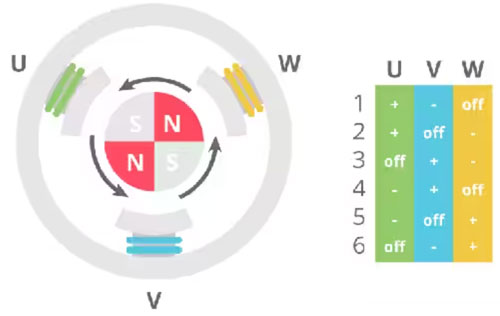
图 1:BLDC 电机的 6 步换向模式:(图片来源:CUI Devices)
为了使控制器能够有效地使电机换向,控制器必须始终获得关于转子位置的准确信息。自无刷电机诞生以来,霍尔效应传感器就一直是换向反馈的热门选择。在典型情况下,3 相控制需要三个传感器。电机定子中嵌入了检测转子位置的霍尔效应传感器,这样就可以切换三相电桥中的晶体管来驱动电机。三个霍尔效应传感器的输出一般标记为 U、V 和 W 通道。遗憾的是,这种位置反馈法有一些缺点。虽然霍尔效应传感器的 BOM 成本很低,但将这些传感器集成到 BLDC 中的成本可能是电机总成本的两倍。此外,控制器只能从霍尔效应传感器获得电机位置的部分信息,这在需要精确位置反馈才能正常运行的系统中会造成问题。
编码器可提供更高的精度
在当今世界,需要无刷直流电动机的系统对位置测量精度的要求远远高于以往。为此,除了霍尔效应传感器外,可将增量编码器可与无刷直流电机配对使用。这就给出了一个具有改进型位置反馈的系统,但现在需要电机制造商在电机中添加两个霍尔传感器,以及在装配后增加一个增量编码器。更好的选择是忽略霍尔效应传感器,用换向编码器取代增量编码器。换向编码器具有用于精确位置跟踪的增量输出,以及与电机的特定磁极配置相匹配的换向输出,这类器件如 CUI Devices 的 AMT31 或 AMT33 系列器件。CUI Devices 的换向编码器是数字式器件,可以对这些参数(包括极数、分辨率和方向)进行编程。这样,工程师就能灵活地进行原型开发和测试,减少多设计中的编码器 SKU 数量。
对齐换向电机
当在电机上施加电流时,电机会旋转,反之,当旋转电机时,就会产生电流。如果旋转无刷直流电动机,我们会看到 3 相的输出与以下图 2 所示类似。为使换向编码器,甚至霍尔效应传感器与无刷直流电动机正确对齐,所产生的换向波形应与反电动势对齐。传统上,这将导致一个反复过程,需要用第二台电机来驱动第一台电机,并需要用示波器观察波形。这可能会耗费时间,并增加大制造成本。
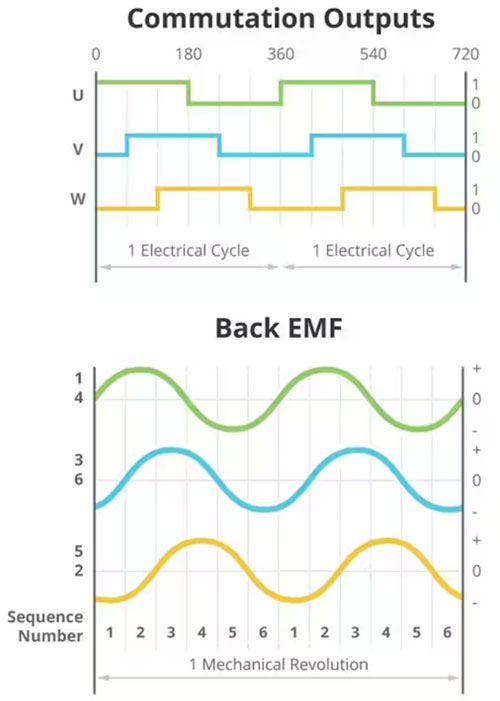
图 2:换向输出和电机相位(图片来源:CUI Devices)
使用 AMT 容式编码器几乎能实现瞬时对齐,且只需要一个电源。安装编码器后,用户只需向对应于 AMT 编码器所需起始位置的那两相供电,并发出对齐命令。这样做,用户就从根本上设定了编码器的换向波形和电机反电动势波形的起始位置。
除了易于对齐之外,AMT 编码器的换向信号与电机磁极的对齐也更加精确。将换向编码器对齐电机,只是设置了起始位置(即换向波形的起始位置)。如果操作适当,换向波形应与电机的反电动势波形完全匹配。然而,这总情况并不是总能实现的。使用霍尔传感器或光学编码器的典型对齐范围是在 ±1 电度。另一方面,AMT 编码器可达到更高的精度,通常在 ±0.1 电度以内。AMT 编码器的波形从 U 和 W 都是高电平时开始(上述波形中的第三个状态);请咨询电机制造商,了解相应的反电动势图,以确定在对齐过程中哪些相应该通电。
AMT 换向编码器的方向设置
除了可编程极数和分辨率功能外,AMT 系列还为换向应用提供了方向设置――这是大多数其他换向编码器制造商没有提供的独特功能。简单地说,通过方向我们能够知道编码器的轴应该以何种方式旋转,以使换向信号前移。通常情况下,换向编码器安装在电机的后轴上。在这种情况下,当电机逆时针旋转时(从电机后部看),换向信号在其状态中前移。然而,如果编码器安装在前轴上,就根本上把编码器翻转过来了,现在当我们逆时针旋转电机时(从电机后面看),编码器轴实际上是顺时针旋转的(从编码器上自上而下看)。这意味着电机磁极与编码器磁极的旋转方向相反,如下图 3 所示。至于其他不含这种可编程选项的技术,则需要对编码器盘或 U、V、W 通道进行物理交换,以完成同样的任务。对于利用多个具有不同方向要求的无刷直流电机的应用来说,这种可编程功能可能特别有用。
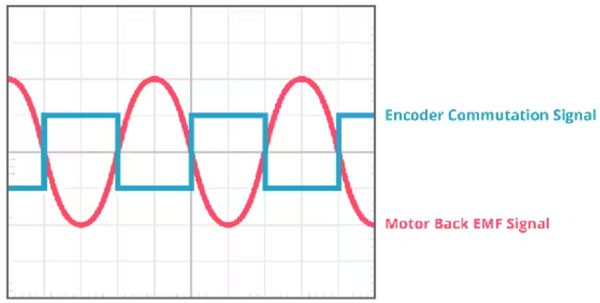
图 3:换向波形与反电动势方向相反(图片来源:CUI Devices)
结语
BLDC 电机的使用在持续增长,如果采用严格的控制回路和高精度位置检测反馈,这类电机可在许多应用中表现出色。霍尔效应传感器得益于其低 BOM 成本,多年来一直是首选解决方案,但除了与增量编码器配对使用外,霍尔传感器往往无法提供完整的电机位置信息。不过,CUI Devices 的 AMT 换向编码器提供了一种多合一解决方案,完全不需要霍尔效应传感器和增量编码器。CUI Devices 的 AMT31 或 AMT33 换向编码器以其灵活的可编程功能、简单的安装方式成为市场上最热门的选择。如本文所述,对于即将到来的 BLDC 电机项目来讲,在我们基本上了解换向编码器原理后,就能让这类编码器成为一种引人注目的选择。
|