|
ұҫИЛіӨЖЪҙУКВРВДЬФҙЖыіөЦчЗэөз»ъөДИнјюҝӘ·ў№ӨЧчЈ¬ЧЁЧўУЪА©Х№ҝЁ¶ыВь№ЫІвЖчЎўёЯЖөЧўИлөИХл¶Фөз»ъёчПоІОКэөДК¶ұрЛг·ЁөДСРҫҝЈ¬¶ФКРГжЙПёчёці§ЙМөДөзЗэ·Ҫ°ё¶јУРЛщБЛҪвЎЈұҫЖӘОДХВЈ¬ОТГЗҪ«¶ФPower IntegrationsЈЁТФПВјтіЖPIЈ©№«Лҫөз»ъҝШЦЖИнјюҝӘ·ўМЧјюҪшРРІвЖАЈ¬ЖдЦР°ьАЁЙПО»»ъИнјюMotor-Expert 2.0әН»щУЪ
libTPCFOC_IPH_Curr_Recon_v01.00.000.aөз»ъҝШЦЖҝвөДПВО»»ъИнјюЎЈёГИнјюҝвҙоЕдPI BridgeSwitch™№ҰВКЖчјюЈ¬ДЬ№»КөПЦ400VөзС№ЖҪМЁПВөДЦРРЎ№ҰВКОЮЛўөз»ъЗэ¶ҜЈ¬ККУГУЪјТУГ»тЙМУГөДҝХөчЎў·зЙИөИЈ¬ҫЯУРәЬ№гА«өДУҰУГіЎҫ°ЎЈН¬КұУЙУЪЖд№ҰВКЖчјюөДёЯ¶ИјҜіЙ»ҜЈ¬ј«ҙуөДҪөөНБЛУІјюіЙұҫәНјхЙЩБЛPCBХјУГҝХјдЎЈПВГжОТГЗҪ«ҝӘКјҫЯМеІвЖАЎЈ
Хл¶ФОДЦРіцПЦөДЛхВФҙКЈ¬ОӘұЬГвЖзТеЈ¬ФЪҙЛМбЗ°ЙщГчЈә
ҝӘ·ўМЧјю№ҰДЬТ»АА
КЧПИЈ¬ОТГЗАҙҝҙҝҙұҫҙОІвЖА¶ФПуPIөз»ъҝШЦЖИнјюҝӘ·ўМЧјюөДҫЯМеЧйіЙЎЈЦчТӘ°ьАЁЙПО»»ъИнјюMotor-Expert 2.0әНПВО»»ъИнјю»щУЪ
libTPCFOC_IPH_Curr_Recon_v01.00.000.aөз»ъҝШЦЖҝвЎЈ
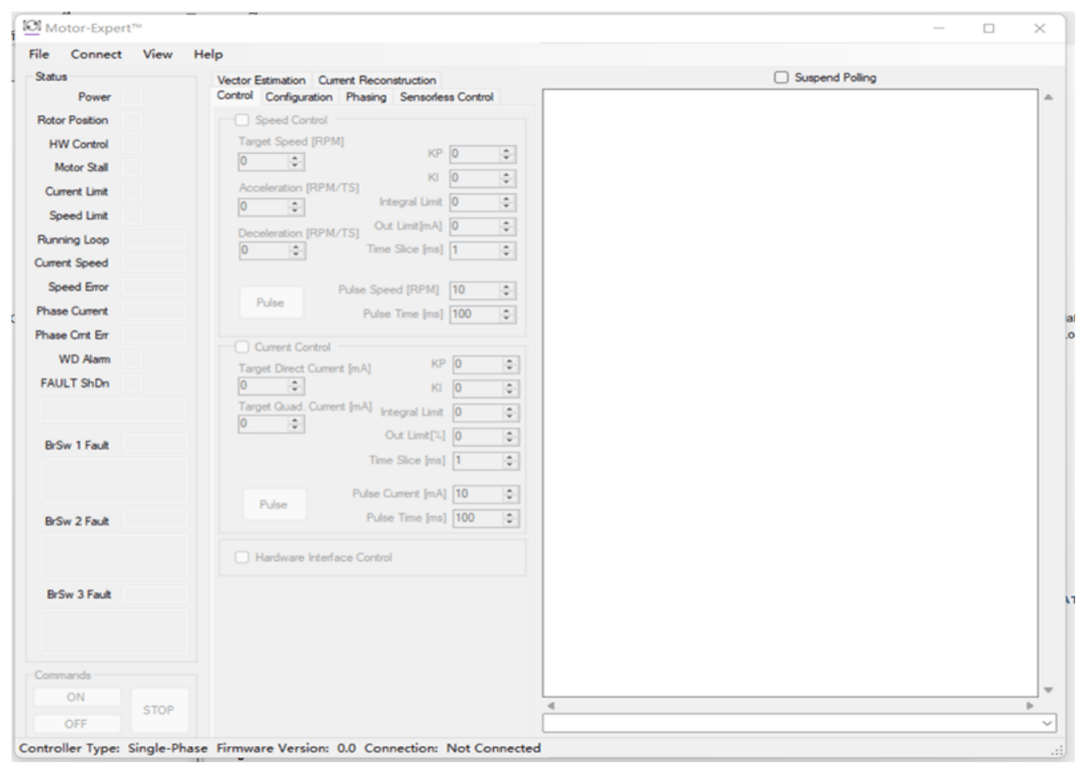
Motor-Expert 2.0КЗPIНЖіцөДТ»ҝоЗ¶ИлCУпСФУҰУГіМРтЎўҝвј°ҝШЦЖGUIөДИнјюЈ¬К№УГBridgeSwitch™ОЮЛўЦұБчЈЁBLDCЈ©өз»ъЗэ¶ҜЖчICөДЙијЖИЛФұЈ¬ҪиЦъёГИнјюҝЙ¶ФИэПаөз»ъөДФЛРРРФДЬҪшРРҫ«И·өДҝШЦЖәНөчХыЎЈЖдУлөз»ъҝШЦЖҝвөДНЁРЕРӯТйКЗ№«ҝӘөДЈ¬УГ»§ФЪІъЖ·ҝӘ·ў№эіМЦРҝЙК№УГёГЙПО»»ъҪшРРөчКФЎЈёщҫЭЛөГчОДөөХыАнј°ИнјюҪзГжПФКҫЈ¬ёГЙПО»»ъҫЯұёИзПВ№ҰДЬЈәөз»ъЧҙМ¬ПФКҫЎўөз»ъІОКэЙиЦГЎўөз»ъҝШЦЖЦёБоЙиЦГЎўКэҫЭІЁРОПФКҫЈЁН¬Т»КұҝМЧо¶аЛДёцРЕәЕЈ©ЎўҝШЦЖМЁөИЎЈ
¶ФУЪПВО»»ъИнјюөз»ъҝШЦЖҝв
libTPCFOC_IPH_Curr_Recon_v01.00.000.aЈ¬ОТГЗёщҫЭЛөГчОДөөЈ¬ДЬ№»ХыАн·ўПЦёГИнјюҝвҫЯұёТФПВ№ҰДЬЈә
-ёЯҝЙЕдЦГРФЈ¬°ьАЁФЪФЛРР№эіМЦРТІҝЙТФҪшРРЕдЦГЈ¬Н»іцТ»ёцЎ°Бй»оЎұ
-ЛЩ¶И»·ҝШЦЖЎўЕӨҫШ»·ЈЁөзБч»·Ј©ҝШЦЖ
-НЁ№эК№УГBridgeSwitch™№ҰВКЖчјюЈ¬¶ФИэПаөзБчҪшРРЦШҪЁЈ¬КөПЦИэПаОЮЛўөз»ъОЮёРКёБҝҝШЦЖ
-Ц§іЦBridgeSwitch™№ҰВКЖчјюөДҙнОуЧЬПЯ№ҰДЬЎЈҙнОуЧЬПЯК№УГөҘПЯНЁРЕЈ¬ҝЙК№ИэЧй°лЗЕНЁ№эН¬Т»ёщРЕәЕПЯБ¬ҪУЦБөҘЖ¬»ъЈ¬ПтөҘЖ¬»ъҙ«ЛН°лЗЕөДЛДёцј¶ұрөДЗ·С№Ўў№эС№Ўў°лЗЕ№эИИЎўЗэ¶ҜЧҙМ¬Ўў№эБчөИ№КХПРЕПўЈ¬ёГ№ҰДЬј«ҙуөДјхЙЩБЛөҘЖ¬»ъТэҪЕөДК№УГЈ¬И·КөУЕРгЈ¬ұҫИЛөЪТ»ҙОјы№ҰВКЖчјюј°Зэ¶ҜТФЧЬПЯРОКҪҙ«өЭ№КХПРЕПў
-¶Ф№ҰВКЖчјюөДјаҝШЎўұЈ»Ө
-КэҫЭјЗВјЎў»Ш·Е№ҰДЬЈ¬·ҪұгПөНіЧҙМ¬Хп¶ПәНПөНіІОКэөчКФ
-УлЙПО»»ъИнјюөДНЁРЕЈ¬·ҪұгҪшРРөз»ъҝШЦЖәНКэҫЭҝЙКУ»Ҝ
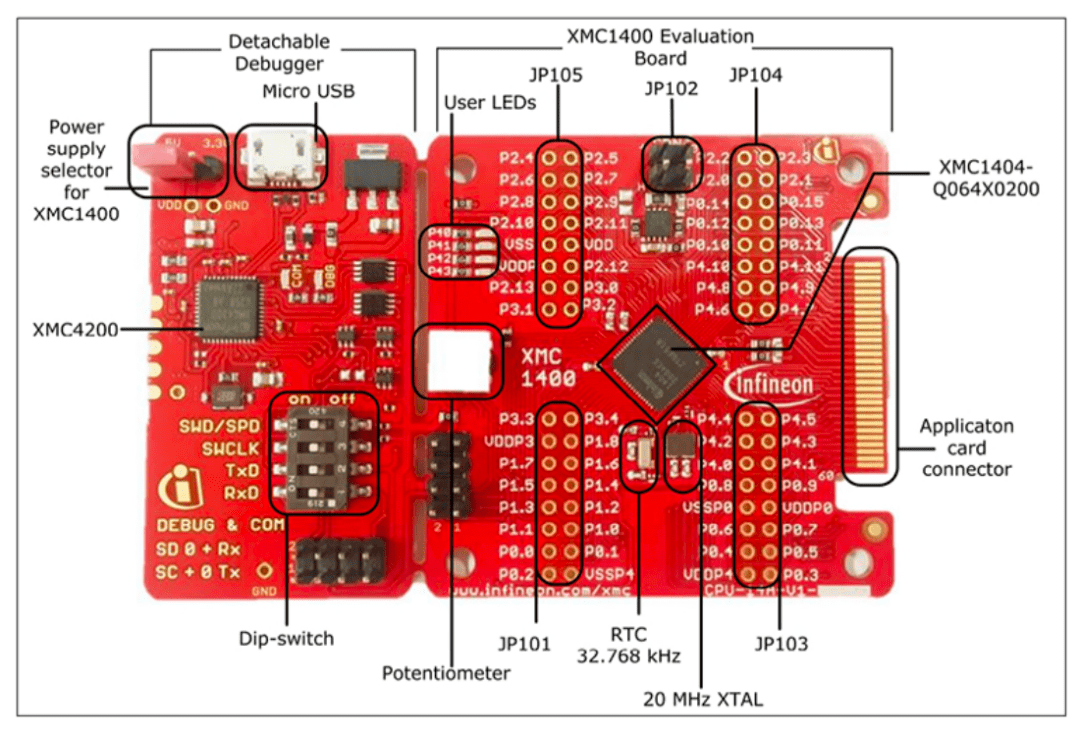
-·ҪұгТЖЦІЦБЖдЛыөҘЖ¬»ъЖҪМЁЎЈёГИнјюҝвөДDemoКЗ»щУЪXMC1400өҘЖ¬»ъЈ¬ОӘCortex-M0ДЪәЛЈ¬48MHzЈ¬ЛщТФ¶ФУЪҙуІҝ·Ц»щУЪCortex-MәЛөДөҘЖ¬»ъ¶јҝЙК№УГЈ¬Ц»КЗ¶ФУЪЦ§іЦёЎөгјЖЛгөДөҘЖ¬»ъЈ¬УРөгРФДЬАЛ·СЈ»К№УГDAVEҝӘ·ў»·ҫіЈ¬ұаТлБҙОӘARM-GCCЈ¬ЛщТФТЖЦІКұРиҝјВЗұаТлБҙЖҘЕдЎЈ
ЧЫЙПЛщКцЈ¬ёГөз»ъҝШЦЖҝвҫЯУРНкХыөДөз»ъҝШЦЖ»·В·Лг·ЁЈ¬ФЪКөјКК№УГ№эіМЦРЈ¬УГ»§Ц»РиТӘЧЁЧўҙҰАнИзПВ№ӨЧчЈәөҘЖ¬»ъУІјюККЕдЎўІъЖ·УҰУГІгЙијЖЎўІъЖ·ІОКэЕдЦГЎЈ
ГчИ·МЧјю№ҰДЬәуЈ¬ОТГЗөДІвЖАІҪЦиТІ»щұҫИ·¶ЁЈәКЧПИК№УГXMC1400ЈЁөҘЖ¬»ъҝӘ·ў°еЈ©ЎўDER-870ЈЁBridgeSwitch™ЖчјюЖА№А°еЈ©№№ҪЁөз»ъҝШЦЖУІјюЎЈИ»әу¶ФPI DemoіМРтЈЁBridgeSwitch Three-Phase Sensorless FOC Code Library using Integrated Phase Current (IPH)Ј©ҪшРРУІјюККЕдЎЈФЩК№УГЙПО»»ъИнјюMotor-Expert 2.0ҪшРРөз»ъҝШЦЖ»·өДІОКэөчУЕЎЈЧоәуЈ¬К№УГЙПО»»ъИнјю¶Фөз»ъЧҙМ¬ЎўПа№ШКэҫЭІЁРОҪшРРПФКҫХ№КҫЎЈ
УІјю»·ҫіҙоҪЁ
1. ДжұдЗЕЈәДжұдЗЕК№УГPI DER-870ЖА№А°еЈ¬КөОпИзПВИзЛщКҫЈә
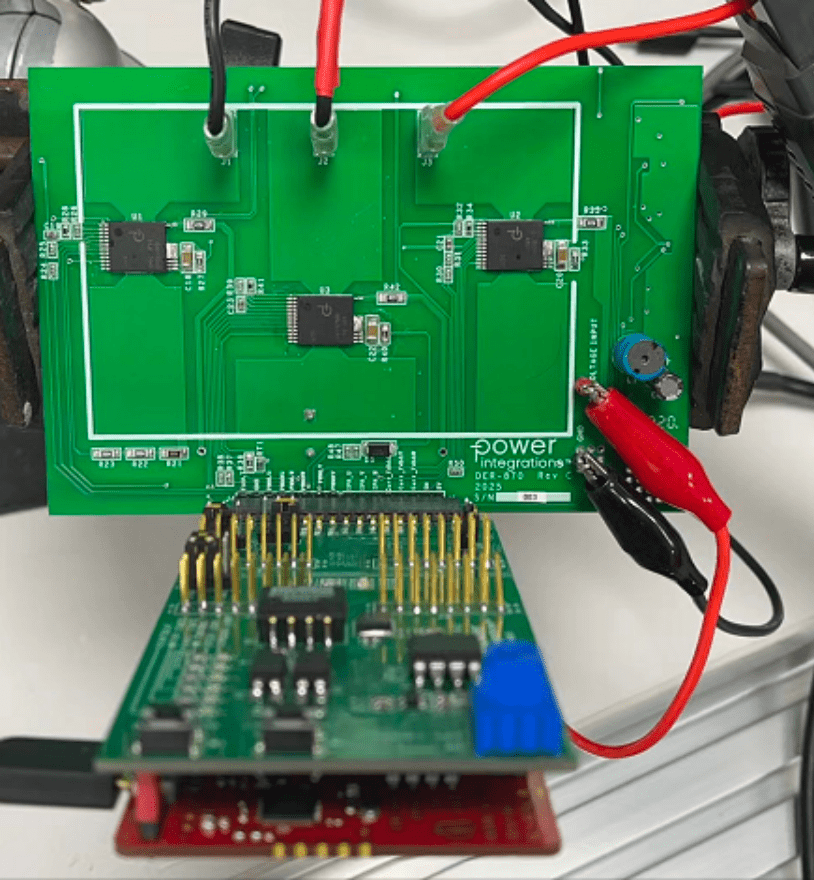
ёГЖА№А°еК№УГИэҝЕBridgeSwitch™ BRD1267C °лЗЕЖчјюЈ¬ФӯАнНјИзПВЛщКҫ

ёГЖА№А°еөДЦчТӘНвІОКэИзПВНјЛщКҫ
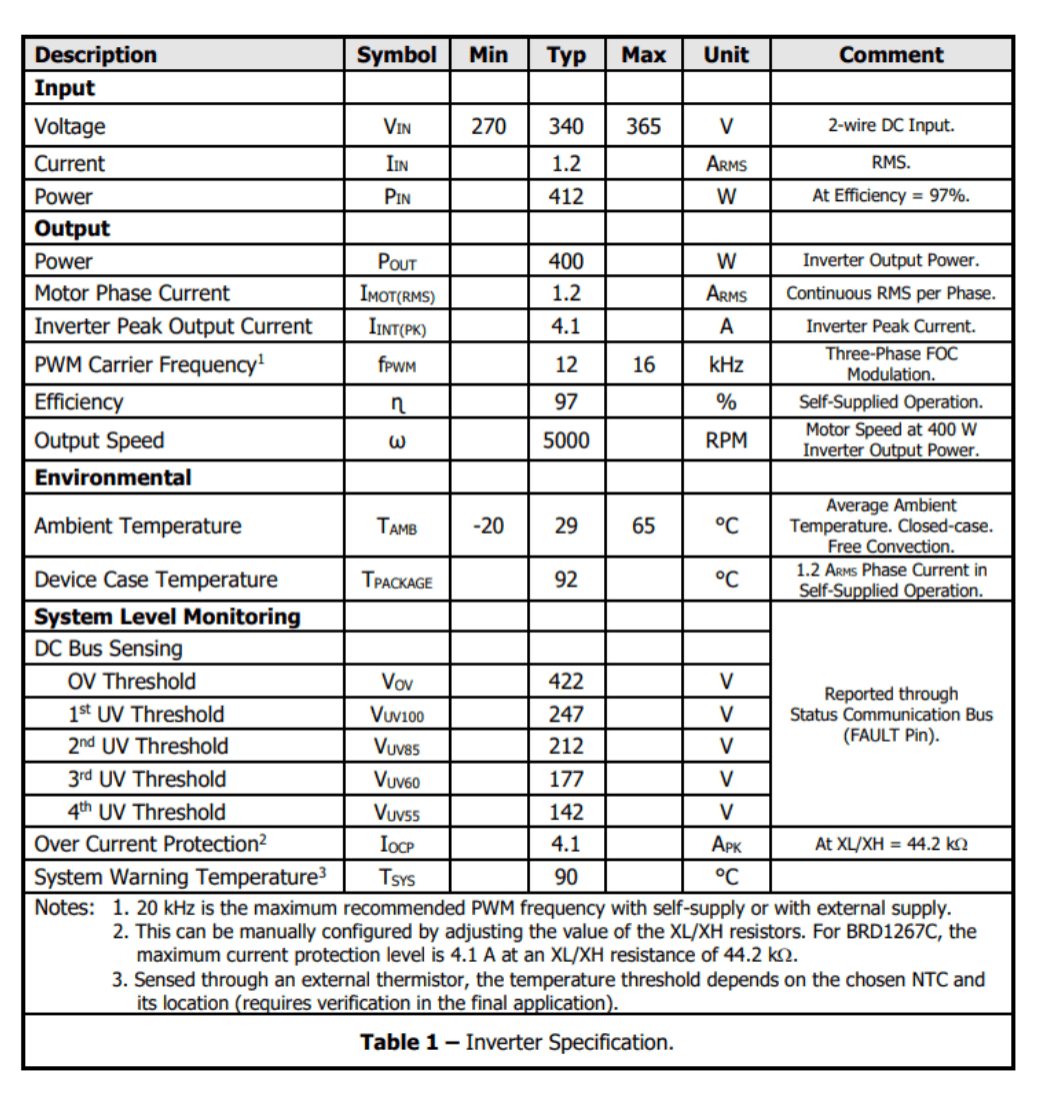
ҝЙТФҝҙіцЈ¬ёГ°лЗЕөДөзВ·ј«ЖдјтөҘЈ¬Ц»РиФЪНвО§ЕдЦГөзЧиЎўөзИЭјҙҝЙХэіЈ№ӨЧчЎЈёГЖА№А°еұіІаБнУР¶оНвөДөзБчІЙјҜөзВ·Ј¬КФУГ№эіМЦРПВОҙК№УГЈ¬№КОҙБРіцЖдФӯАнЎЈҪбәПФӯАнНјЎўІОКэЎўDatasheetҝЙЦӘЈ¬ёГЖА№А°еөДөзЖшҪУҝЪ¶ЁТеИзПВЈә
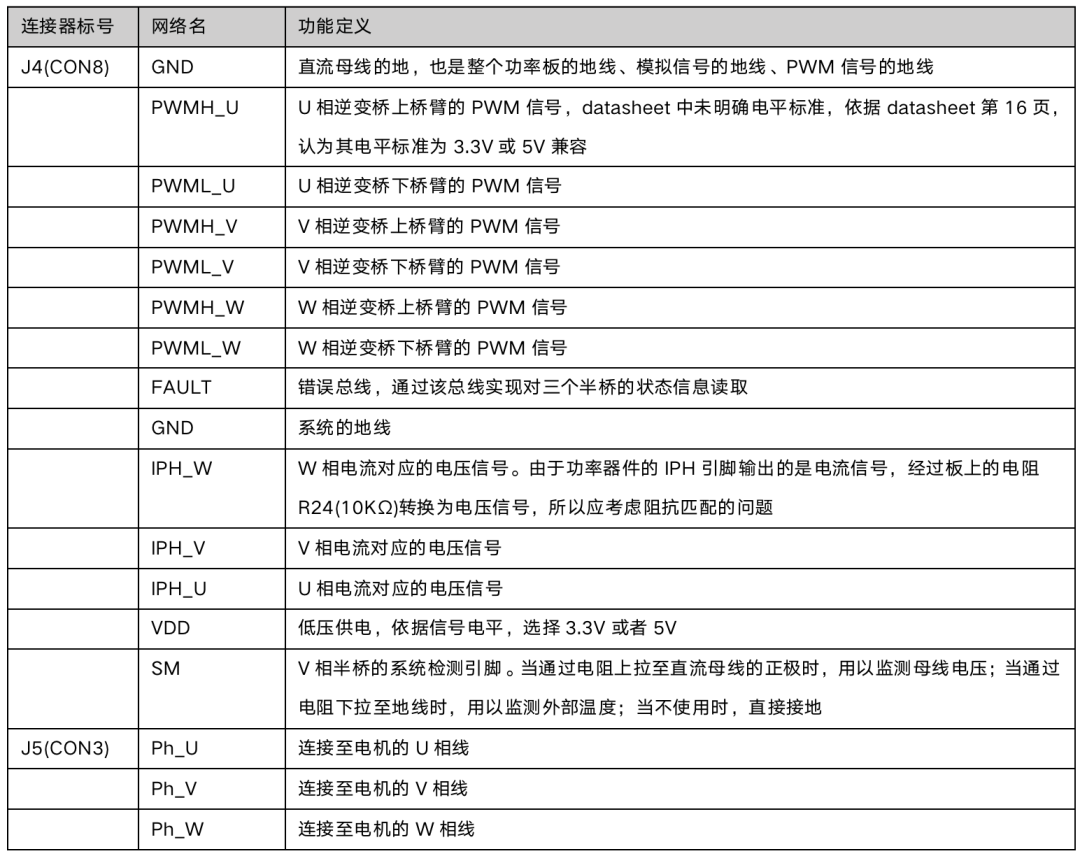
ҙЛНвЈ¬ёГЖА№А°еөД№ШјьөзРЕәЕЦчТӘ°ьАЁЈә°лЗЕ№ҰВКЖчјюЈ¬ПаөзБчУлөзБчРЕәЕөД¶ФУҰ№ШПөОӘ400uA/AЈ¬өзБчРЕәЕЧӘөзС№РЕәЕЛщК№УГөДөзЧиЦөОӘ10KҰёЈ¬¶ФУҰөзС№РЕәЕОӘ4V/AЈ¬ёГ°лЗЕЧоҙуКдіцөзБчОӘ0.7AЈ¬¶ФУҰЧоҙуКдіцөзС№ОӘ2.8VЈ»°лЗЕөДЙПЗЕұЫК№УГөДPWMРЕәЕОӘөНВЯјӯЈ¬јҙөұёГPWMРЕәЕОӘөНКұЈ¬¶ФУҰЙПөДЙПЗЕұЫөјНЁЈ»ЖчјюIDЈ¬ДжұдЗЕК№УГИэёц°лЗЕ№ҰВКЖчјюЈ¬ёГИэёц°лЗЕК№УГН¬Т»ёщFAULT_BUSРЕәЕУлОўҝШЦЖЖчНЁРЕЈ¬ТтҙЛРиТӘЙиЦГГҝёц°лЗЕөДНЁРЕК¶ұрIDЈ¬НЁ№эҪ«°лЗЕ№ҰВКЖчјюөДIDТэҪЕ·ЦұрЈәБ¬ҪУЦБBPLТэҪЕЎўРьҝХЎўБ¬ҪУSGТэҪЕ№ІИэЦЦ·ҪКҪАҙЙиЦГИэёцIDЈ¬ОўҝШЦЖЖчҫЯУРД¬ИПөДIDЈ¬ТтҙЛОЮРиЙиЦГЎЈ
2. XMC1400ЖА№А°е
3. Б¬ПЯЈәТАҫЭDemoОДөөЈ¬ҪУПЯ№ШПөИзПВ

4.өз»ъЈәөз»ъБ¬ҪУИзПВНјЛщКҫЈә

өз»ъҝШЦЖИнјюDemo·ЦОц
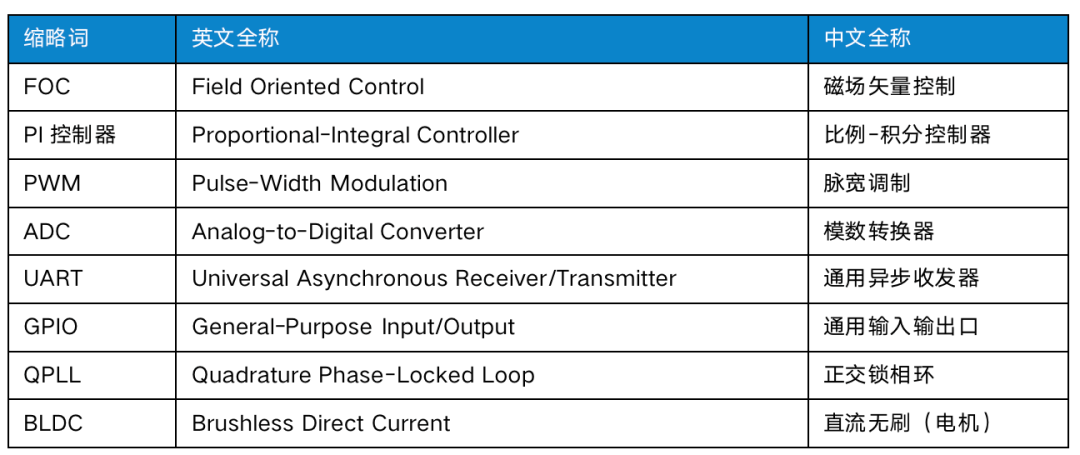
УІјю»·ҫіҙоҪЁНкіЙЈ¬ИГОТГЗАҙҝҙҝҙИнјюІҝ·ЦЎЈөз»ъҝШЦЖИнјюDemoіМРтҪ«ҙъВлЦчТӘ·ЦОӘИэІгЈәУІјюійПуІгЎўөз»ъҝШЦЖЛг·ЁІгЎўөз»ъҝШЦЖУҰУГІгЎЈУІјюійПуІг°ьАЁҙнОуЧЬПЯЗэ¶ҜЎўPWMЗэ¶ҜЎўADCЗэ¶ҜЎўUARTЗэ¶ҜЎўGPIOЗэ¶ҜЎўҝҙГЕ№·Зэ¶ҜЎЈөз»ъҝШЦЖЛг·ЁІг°ьАЁFOCЎў·ҙАЎРЕәЕҙҰАнЎўV/f(С№Жө)ҝШЦЖЎўPIҝШЦЖЖчЎўЛЩ¶И»·ЎўјУЛЩ¶ИҝШЦЖЎўЧҙМ¬№ЫІвЖчЎўПаөзБчЦШ№№ЎўөзБч»·ЎўҙнОуЧЬПЯјаҝШЎўЧҙМ¬јаҝШЎЈөз»ъҝШЦЖУҰУГІг°ьАЁ№КХПҙҰАнЎўөз»ъҝШЦЖЎўКэҫЭІЙјҜЎўУлЙПО»»ъИнјюөДНЁРЕЎЈ
өЪТ»ІҪЈәөз»ъЖф¶Ҝ№эіМ
ҙЛөз»ъҝШЦЖҝвЛщК№УГөДЧӘЧУО»ЦГ№ЫІвЛг·ЁКЗ»щУЪҙЕБҙ№ЫІвЛг·ЁЈ¬өұөз»ъЧӘЛЩ№эөНЎўөзБчМ«РЎЈЁРЕФлұИМ«РЎЈ©КұЈ¬Ҫ«өјЦВ№ЫІвЖчОЮ·ЁОИ¶ЁұХ»·Ј¬№КРиТӘПИҪ«өз»ъЧӘЛЩҝӘ»·МхјюПВҪшРРЧӘ¶ҜЈ¬ЖдЖф¶Ҝ№эіМИзПВНјЛщКҫЈә
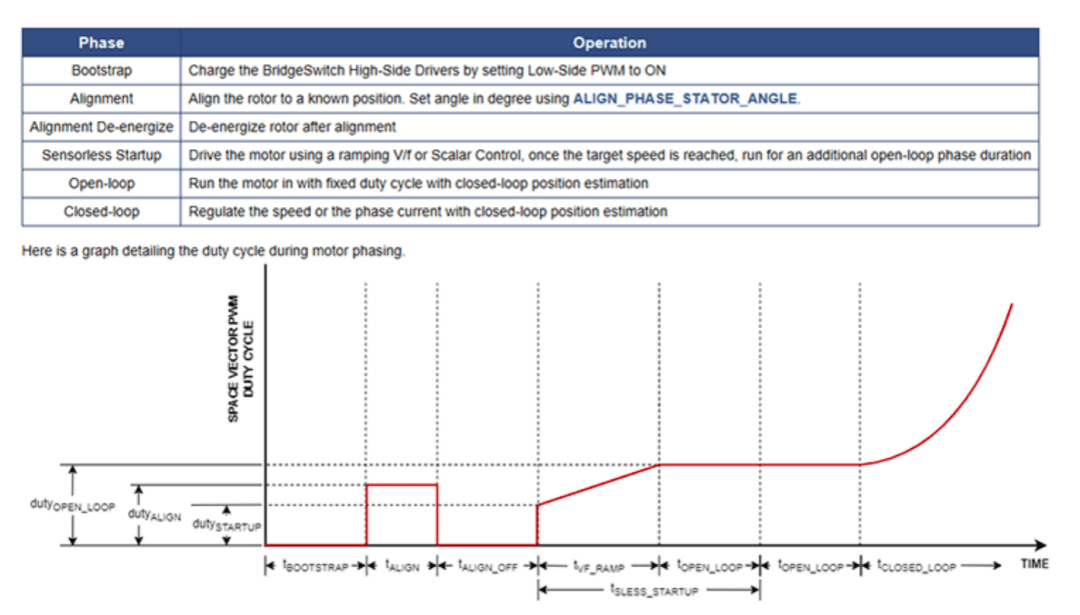
BootstrapҪЧ¶ОЈәФЪөНіЙұҫөДДжұдөзВ·ЦРЈ¬¶ФУЪДжұдЗЕЙПЗЕұЫөДГЕј¶Зэ¶ҜЖХұйІЙУГЧФҫЩөзВ·Ј¬НЁ№э¶юј«№ЬЎўөзИЭАҙО¬іЦЙПЗЕұЫҝӘНЁКұЛщРиТӘөДөДГЕј¶өзС№ЎЈФЪЙПНјөДBootstrapҪЧ¶ОЈ¬өұөЪТ»ёц°лЗЕөДЙПЗЕұЫ№Ш¶ПЎўПВЗЕұЫҝӘНЁКұЈ¬НЁ№э¶юј«№Ь¶ФЧФҫЩөзИЭідөзЈ¬К№өГЙПЗЕұЫФЪПВТ»ёцPWMЦЬЖЪДЪҝЙТФХэіЈ№ӨЧчЎЈ
AlignmentҪЧ¶ОЈәҙЛҪЧ¶ОЈ¬НЁ№эёш¶ЁТ»ёц·ҪПтәг¶ЁөДөзҙЕіЎЈ¬ЗҝРРАӯ¶Ҝөз»ъЧӘЧУЧӘөҪёГҪЗ¶ИёҪҪьЎЈ
Alignment De-energizeҪЧ¶ОЈәЙПТ»ҪЧ¶ОәуөДТ»¶ОҝХПРКұјдЈ¬ІВІвКЗУГУЪөИҙэЧӘЧУОИ¶ЁПВАҙЎЈ
Sensorless StartupҪЧ¶ОЈәҙЛҪЧ¶ОНЁ№эҝӘ»·НП¶ҜЈ¬К№өз»ъЧӘЛЩЦрҪҘМбёЯЦБЙи¶ЁөДЧӘЛЩЦөЎЈ
Open-LoopҪЧ¶ОЈәҝШЦЖЖчКдіц№М¶ЁөДХјҝХұИРЕәЕЈ¬К№өз»ъЧӘЛЩЦрҪҘОИ¶ЁПВАҙЈ¬ФӨЙиЦГ№ЫІвЖчЈ¬УГУЪПВТ»ҪЧ¶ОөДұХ»·ҝШЦЖЎЈ
Closed-LoopҪЧ¶ОЈә»щУЪЙПТ»ҪЧ¶ОөДОИ¶ЁФЛРРЈ¬К№УГҙЕБҙ№ЫІвөД·Ҫ·ЁЈ¬ҪшРРөз»ъЧӘЧУҪЗ¶ИЎўЧӘЛЩөДұХ»·№ЫІвЎўөзБч»·ЎўЧӘЛЩ»·ЎўУҰУГІгөИөДХэіЈФЛРРЎЈ
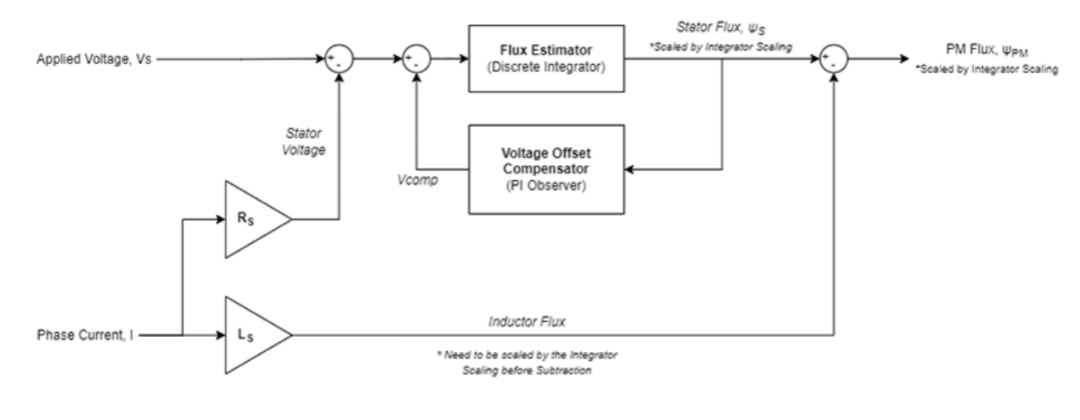
өЪ¶юІҪЈәөз»ъҙЕБҙ№ЫІвЖч
ҙЕБҙ№ЫІвЖчФӯАнИзПВНјЛщКҫЎЈVsјҙҝШЦЖЖчөДКдіцөзС№Ј¬јхИҘөз»ъөзБчЎБөз»ъөзЧиЈ¬АнПлЗйҝцПВЈ¬ОӘөз»ъөД·ҙөз¶ҜКЖ+өз»ъөзёРөДөзС№Ј¬НЁ№эёГөзС№јЖЛгөГөҪЧЬөДҙЕБҙЈ¬ІўјхИҘУЙөзБч+өзёРІъЙъөДҙЕБҙЈ¬јҙҝЙөГөҪөз»ъЧӘЧУөДҙЕБҙЎЈУЙҙЛҝЙТФҝҙіцЈ¬өұөз»ъЧӘЛЩ№эРЎЈ¬Ҫ«өјЦВ·ҙөз¶ҜКЖ№эРЎЈ¬РЕФлұИ№эРЎЈ¬У°Пм№ЫІвР§№ыЎЈН¬КұҝЙТФҝҙіцЈ¬өз»ъөзёРЎўөзЧиЎўУАҙЕМеҙЕБҙөИІОКэТІҪ«У°Пм№ЫІвЖчөДҪб№ыөДЧјИ·РФЎЈ
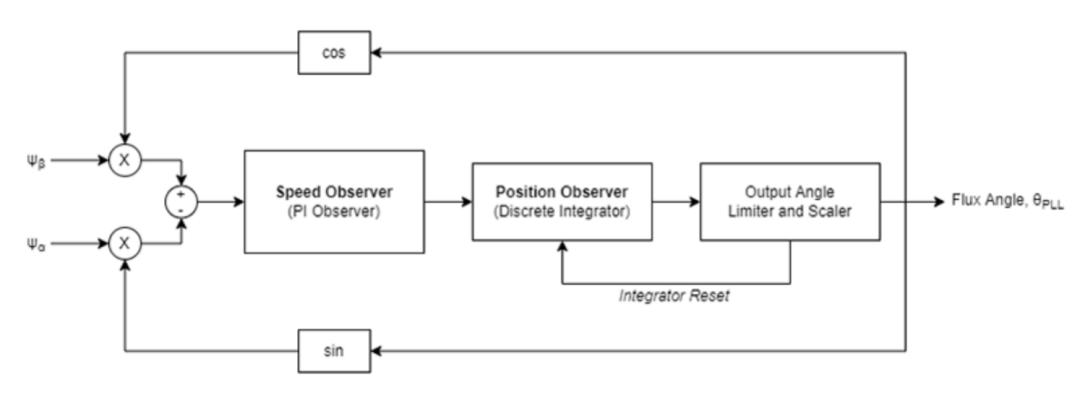
өЪИэІҪЈәөз»ъЧӘЧУО»ЦГ№ЫІвЖч
АнВЫЙПЈ¬өұөГөҪЧӘЧУөДҙЕБҙКёБҝКұЈ¬јҙҝЙНЁ№эarctan()әҜКэјЖЛгіцөз»ъЧӘЧУО»ЦГЈ¬ө«КЗКөјКЦРҙЛ·Ҫ·ЁјЖЛгөГөҪөДөз»ъҪЗ¶ИОЖІЁГ«ҙМ№эҙуЈ¬әуРиТ»ёцөННЁВЛІЁЖчЎЈҙЛөз»ъҝШЦЖҝвК№УГХэҪ»ЛшПа»·QPLL¶ФҙЕБҙКёБҝҪшРРҙҰАнЈ¬јҙҝЙөГөҪөНГ«ҙМөДЧӘЧУО»ЦГРЕәЕЎЈ
өЪЛДІҪЈәЙПО»»ъИнјюMotor-Expert 2.0
Motor-Expert 2.0ИнјюКЗPI№«ЛҫХл¶ФЖдөз»ъҝШЦЖИнјюЙијЖөДөчКФИнјюЈ¬НЁ№эҙ®ҝЪУлДҝұкҝШЦЖЖчҪшРРКэҫЭҪ»»ҘЈ¬НкіЙІОКэЕдЦГЎўГьБоЙиЦГЎўКэҫЭ»Шҙ«өИ№ҰДЬЎЈ
ҫЯМеК№УГІҪЦиИзПВЈә
-ФЪПВО»»ъДЪЙХРҙөз»ъҝШЦЖИнјю
-Б¬ҪУНЁ№эUSBБ¬ҪУПВО»»ъЦБPC
-өг»чЙПО»»ъІЛөҘАёЎ®ConnectЎҜЈ¬ФЪөҜіцөД¶Ф»°ҝтЦРЈ¬СЎФс¶ФУҰөДҙ®ҝЪәЕЈ¬Ц»УРСЎФсБЛХэИ·өДҙ®ҝЪәЕЈ¬ІЕДЬҪшРРәуРшөДІЩЧч
-ЕдЦГІОКэЈә
✔️өг»чЎ®ConfigurationЎҜ
✔️Ў®Motor ConfigurationЎҜЈ¬өз»ъРэЧӘ·ҪПтЈ¬ЛіКұХл»тХЯДжКұХлЈ¬ҝҙРиЗуСЎФс
✔️Ў®Current FeedbackЎҜЈ¬ДжұдөзВ·ІОКэСЎФсЈ¬ОТК№УГөДDER-870ҝӘ·ў°еК№УГөДЖчјюОӘBRD1267Ј¬ЧӘ»»өзЧиОӘ10000 Ohm
✔️Ў®Motor Stall MonitoringЎҜЎўЎ®Current Limit MonitoringЎҜЎўЎ®Speed Limit MonitoringЎҜөИёщҫЭРиТӘёьёД
✔️Ў®Motor ParametersЎҜЈ¬ёщҫЭКөјКМоРҙДёПЯөзС№Ўўөз»ъөзЧиЎўөзёР
✔️өг»чЎ®PhasingЎҜЈ¬ҙЛТіГжөДІОКэ¶ФУҰөз»ъөДЖф¶Ҝ№эіМІОКэЈ¬өұ·ўПЦөг»чОЮ·ЁЖф¶ҜЈ¬»тХЯЖф¶ҜКұ№эБчЈ¬РиөчҪЪҙЛТіІО
✔️өзБчЦШҪЁЎўҙЕБҙ№ЫІвЖчөДІОКэҝЙФЭКұК№УГД¬ИПІОКэ
✔️өг»чЎ®ControlЎҜЈ¬·ЦұрҪшРРөзБч»·өДІОКэөчҪЪЎўЧӘЛЩ»»ІОКэөчҪЪЈ¬јҙҝЙҪшРРөз»ъөДәгЧӘЛЩҝШЦЖЎЈ
-өұөз»ъҝЙТФҪПОӘОИ¶ЁөДФЛРРәуЈ¬өг»чЎ®Vector EstimationЎҜ,ОТУцөҪөДЦчТӘКЗЎ®Stator Manitude RegularЎҜПВөД»э·ЦПоЎ®KIЎҜІОКэ№эҙуЈ¬өјЦВЧоЦХјЖЛгҪб№ыҪЗ¶ИЖ«Іо№эҙуЈ¬DЦбөзБч№эҙуЈ¬МеПЦіцДёПЯөзБч№эҙуЈ¬ОТҪ«Ў®KIЎҜІОКэјхРЎЈ¬Ў®KPЎҜІОКэјУҙуЦ®әуЈ¬ЧӘЛЩІ»ұдөДЗйҝцПВЈ¬ДёПЯөзБчҙу·щ¶ИјхРЎЎЈ
ФЪөз»ъКөјКЖф¶Ҝ№эіМЈ¬ПИНЁ№эёш¶Ё№М¶ЁөДКёБҝөзБчҪшРРПаО»¶ФЖлЈ¬ҙЛКұөз»ъ»бЧӘ¶ҜТ»ёцРЎҪЗ¶ИЈ¬ІъЙъ¶¶¶ҜЈ¬ХвКЗҙЛАаОЮёРЛг·ЁөДМШөгЎЈФЪөз»ъҝӘ»·НП¶Ҝ№эіМЦРЈ¬Из№ыІъЙъГчПФ¶¶¶ҜЈ¬РиТӘөчХыҝӘ»·НП¶ҜЖЪјдөДPWMХјҝХұИІОКэЈ¬УРМхјюөДЈ¬УҰНЁ№эІвКФЙиұёКөКұјаІвөз»ъЧӘЛЩЈ¬¶ФұИЙи¶ЁөДҝӘ»·НП¶ҜІОКэЈ¬ЕР¶ПҝӘ»·НП¶ҜЧҙМ¬ПВКЗ·с·ўЙъөз»ъЧӘЧУҙЕіЎКёБҝУлөзҙЕКёБҝЦ®јдҪЪЕДІ»Т»ЦВЈЁPWMІОКэМ«РЎКұЈ¬өз»ъЧӘЧУЧӘЛЩРЎУЪөзҙЕКёБҝөДЧӘЛЩЈ©ЎЈФЪҝӘ»·ЧҙМ¬өҪұХ»·ЧҙМ¬Ј¬ҙЛКұИЭТЧІъЙъХс¶ҜЈ¬РиТӘјхИхЛЩ¶И»·өДPIІОКэЈ¬К№ЖдЧӘЛЩ»·РФДЬұдИнЎЈөұұХ»·ҝШЦЖОИ¶ЁЦ®әуЈ¬јҙҝЙҪшРРЧӘЛЩ»·ЦёБоөДөчХыЎЈ
ЧЬҪб
ұҫҙОІвЖАЈ¬ЧЬМеёРКЬКЗЙПКЦәЬҝмЈ¬ҪЪФјБЛәЬ¶аКұјдЎЈУЙУЪК№УГБЛ№Щ·ҪDemoЛщК№УГөДөҘЖ¬»ъҝӘ·ў°еЈ¬ХыёцDemoЛіАыФЛРРЖрАҙ»№КЗұИҪПјтөҘЈ¬»щұҫЙПКЗПВ°аәу¶Б¶Б№Щ·ҪөДПа№ШОДөөЈ¬И»әу°ҙХХDemoОДөөЛщКцБ¬ҪУУІјюЈ¬ФЩБ¬ҪУЙПО»»ъөчІОјҙҝЙЎЈУЙУЪОТК№УГөДөз»ъөзёРұИҪПРЎЈ¬ЛщТФФЪөзБч»·өДөчҪЪЎўҙЕБҙ№ЫІвЖчөчҪЪЙПХјУГБЛТ»¶ЁөДКұјдЎЈЛщКХ»сөДҫӯСйҫНКЗАнҪвИнјюөД»щҙЎЛг·ЁҪб№№Ј¬УРАыУЪёщҫЭөз»ъөДФЛРРЧҙҝцөчҪЪІОКэЎЈ
Н¬КұЈ¬УЙУЪPI BridgeSwitch™№ҰВКЖчјюөдРН№ӨЧчөзС№ОӘ340VЈ¬өзС№өИј¶ОӘ400VЈ¬Чоҙу»чҙ©өзС№ОӘ600VЈ¬№КФЪКРөзПВЈ¬ҫӯ№эТ»ј¶јтөҘөДХыБчВЛІЁәуЈ¬јҙҝЙЧчОӘДҝұкЙиұёөД№ҰВК№©өзЈ¬ПаұИҪПҙ«НіөД·Ҫ°ёЈ¬КЎИҘБЛDCDCөзВ·Ј¬ҪЪКЎБЛіЙұҫЎЈНЁ№эЦұҪУ¶ФКРөзҪшРРХыБчәуЈ¬К№УГҙЛМЧ·Ҫ°ёЈ¬јҙҝЙУГФЪ·зЙИЎўҝХөчЎўУНСМ»ъөИіЈјыөДјТУГөзЖчЦ®ЦРЈ¬ФЪІъЖ·іЯҙзЎўіЙұҫөИ·ҪГж¶јҫЯУРГчПФөДУЕКЖЎЈ
Н¬КұЈ¬ТІУРТ»Р©ҪЁТйЈ¬ТФЖЪҙэёьәГөДМбЙэЎЈУЙУЪ»щУЪҙЕБҙөД№ЫІвЖчЈ¬№эУЪТААө·ҙөз¶ҜКЖЈ¬¶ФУЪј«өНЛЩЧҙМ¬ПВЈ¬ОЮ·ЁОИ¶ЁФЛРРЈ¬ҪЁТйјУИлёЯЖөЧўИл№ЫІвЖчЎўА©Х№ҝЁ¶ыВь№ЫІвЖчөИҪшРРөНЛЩЗшөД№э¶ЙЎЈҙЛНвЈ¬ҪЁТйЙПО»»ъМṩ¶юҙОҝӘ·ўҪУҝЪЈ¬ЧчОӘЧУҪшіМФЛРРФЪҝН»§өДУҰУГіМРт
|

