|
乘坐电梯时,您肯定希望平稳安全地从一层到达另一层。在电梯驱动中,精密的运动控制使电梯能够停在指定位置,并平稳地减速直到完全停止。缺乏精密的运动控制可能会导致电梯误停在两层之间,这会让乘坐电梯的人感到头晕不适或不安全。
机器人、计算机数控机器和工厂自动化设备都需要通过伺服驱动器进行精密的位置控制,此外在许多情况下还需要进行精密的速度控制,以便正确地制造产品并维护工作流程。
工业驱动器的诸多方面都对实现精密的运动控制很重要,精密运动控制涉及实时控制设计中的三个基础子系统,即感应、处理和驱动。本文将论述各个子系统的支持技术示例。
感应
缺乏精密的位置和速度感应,就无法实现精密的运动控制。感应可以包括电机轴角位置和速度感应或传送带线性位置和速度感应。设计人员经常使用增量式光学编码器,每转有几百到一千个槽,以感应位置和速度。这些编码器通常通过正交编码脉冲 (QEP) 连接到微控制器 (MCU),因此需要 QEP 接口功能。
相比之下,绝对编码器的精度明显更高,其通常每转具有更多的槽数,并且经过精密安装以提供绝对角位置。感应到的位置被转换为数字表示形式,并根据标准协议进行编码。此类协议的示例有 Tamagawa 的 T-Format 和 iC-Haus GmbH 的双向串行同步 (BiSS) C。此前,您还需要现场可编程门阵列 (FPGA) 来连接此类编码器,但现在越来越多的 MCU 也具有此功能(如下图 1 所示)。由于 T-Format 和 BiSS C 协议通常与大多数 MCU 上常见的串行外设接口 (SPI)、通用异步接收器发送器 (UART) 或控制器局域网 (CAN) 等流行通信端口或接口所支持的协议不同,因此它们通常需要可定制逻辑块或专有处理单元。
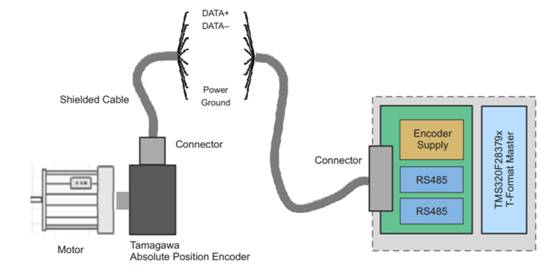
图 1:连接到德州仪器控制 MCU 的绝对编码器
绝对编码器也可以基于电磁或类旋转变压器电路,这需要精确测量正弦电信号。因此,精密运算放大器和电压基准也很重要。电机和运动控制始终需要精确的电机电流和电压检测,尤其是在采用无传感器控制时。常见的解决方案是使用隔离/非隔离式放大器和集成低侧电流检测的驱动器的内联和逆变器桥臂低侧检测。
处理
在精密运动控制系统中执行运动控制配置文件和算法需要具有高计算能力的 MCU。为了提供必要的精度和准确度,此类 MCU 的字长通常为 32 位,并具有原生 64 位浮点支持。由于算法严重依赖三角函数、对数和指数数学,因此许多 MCU 都具有硬件加速器。
考虑到受控运动轴的数量或控制环路的数量,设计人员经常采用多中央处理器 (CPU) 架构或类 CPU 的并行加速器。如有额外的监督和通信任务,也可以考虑采用多个 CPU。
作为实时控制应用,整个信号链的总延迟(即从收集到电流、电压、位置和速度测量结果到更新控制输出的时间)会直接影响控制性能,进而影响精度。一些 MCU 具有片上模拟比较器,可以直接生成控制动作,显著减少延迟和 CPU 负荷。快速中断响应以及现场保存和恢复也很重要。
仅仅拥有高处理能力是不够的。运动控制 MCU 还必须具有通用控制外设,例如 12 位和 16 位模数转换器、QEP 接口、高分辨率边沿和脉冲捕获以及脉宽调制 (PWM) 输出。另外,还要求具备实现自定义逻辑和时序的能力。
为了帮助设计人员更快上手和调整他们的设计,MCU 和电机驱动器供应商提供了电机和运动控制算法,包括无传感器观测器和软件库等核心算法以及具有 GUI 可配置性的完整控制代码。
图 2 是工业驱动器控制 MCU 的概念图。
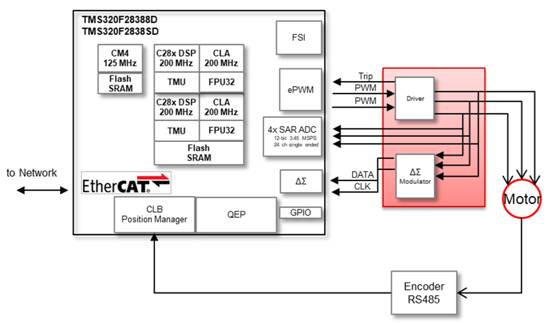
图 2:工业驱动器的 MCU
驱动
提供预期的控制动作需要功率器件和驱动器,通常采用 PWM 形式,占空比代表动作。精确控制 PWM 脉冲非常重要,这意味着驱动器必须以尽可能小的时序偏差提供必要的驱动强度;功率器件必须在确切的预定时间打开和关闭。如今,此类驱动器随处可见,并具有过流和过热保护等附加功能。新型宽带隙功率器件可以确保快速和精确地进行开启和关闭定时。宽带隙器件的快速开关速度和低开关损耗还可实现快速控制环路,以提高稳定性和性能。
除了精度之外,许多应用还要求电机控制设计足够紧凑,因此需要用到具有集成电流检测和电源模块的驱动器。
结语
精密运动控制对于工业驱动器至关重要。技术解决方案涉及实时控制设计的所有三个基础子系统,即感应、处理和驱动,旨在实现精密的运动控制。
|

