|
无刷直流电机一般有两种类型,包括霍尔效应传感器驱动结构和无传感器结构。虽然更复杂,但无传感器架构是更优选的选择。对于无传感器操作,出现了两种控制方案。
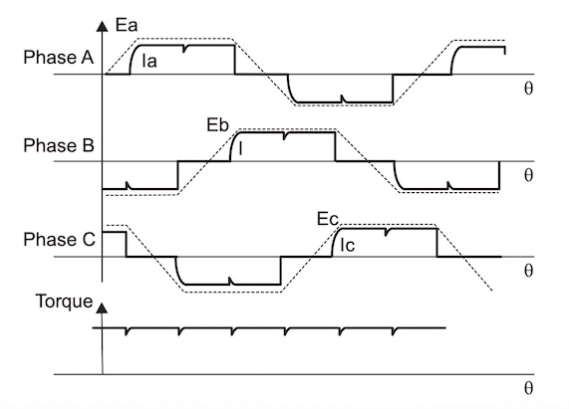
梯形控制方案的时序图。
梯形控制的工作原理是,在任何给定时间都有两个相位。因此,如上所示,在任何相位的过零期间都不会产生扭矩。
该方案会导致在每60°零相位交叉处产生纹波,从而产生谐波。在120°模式下,BLDC驱动器将在每个循环的剩余60°使用高Z状态。
而FOC在反馈控制的转换中的复杂性更高。
三相逆变器的输出产生正弦信号,该信号通过克拉克变换和派克变换进行采样和馈送。
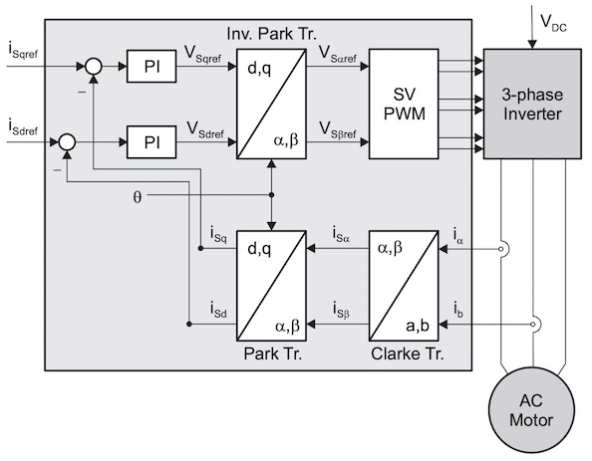
现场定向控制FOC的基本框图。
这两种变换均为通过将定子电流矢量从三相时变系统转换为两坐标时不变系统实现直接转矩控制。
|

