|
јтҪй
өзИЭҙҘГюјјКхЧчОӘТ»ЦЦКөУГЎўКұЙРөДИЛ»ъҪ»»Ҙ·ҪКҪЈ¬ТСҫӯұ»№г·әөДУҰУГөҪёчЦЦөзЧУІъЖ·Ј¬РЎөҪөзөЖҝӘ№ШЈ¬ҙуөҪЖҪ°еөзДФЎўҙҘГюЧАөИЎЈЛжЦ®¶шАҙөДКЗҝјСйІъЖ·ЙијЖХЯИзәО·ў»УЦЗ»ЫЈ¬ФЪ°СІъЖ·УГ»§ҪзГжЙијЖөГ·ҪұгјтҪаөДН¬КұЈ¬УЦДЬіКПЦІъЖ·СӨАцөДНв№ЫЈ¬ҙУ¶шҙшАҙБјәГөДУГ»§МеСйЎЈ
LEDПФКҫУЙУЪҪзГжУСәГЈ¬ҝЙТФКөКұ·ҙУіҙҘГюөДО»ЦГРЕПўЈ¬ФЪөзИЭҙҘГюІъЖ·ЙијЖЦРөГөҪ№г·әУҰУГЎЈұҫЙијЖХэКЗАыУГБЛҙуБҝөДLEDАҙКөПЦәфОьөЖЎў№мјЈөЖөДМШР§Ј¬ҝЙТФОӘАэИзөЖ№вЎўТфБҝЎўОВ¶ИөИҙшУРөчҪЪ№ҰДЬөДІъЖ·МṩЙијЖІОҝјЎЈ
өВЦЭТЗЖчөДMSP430ПөБРөҘЖ¬»ъТФөН№ҰәДәННвЙиДЈҝйөД·бё»РФ¶шЦшіЖЈ¬¶шХл¶ФөзИЭҙҘГюУҰУГЈ¬MSP430өДPIN ROөзИЭҙҘГюјмІв·ҪКҪЦ§іЦIOҝЪЦұҪУБ¬ҪУјмІвөзј«Ј¬І»РиТӘИОәОНвО§ЖчјюЈ¬ј«ҙуөДјт»ҜБЛөзВ·ЙијЖЈ¬¶шұҫЙијЖОДөөЦРК№УГөДMSP430G2XX5ёьЦ§іЦ¶аҙп32ёцIOҝЪЈ¬ҝЙЗэ¶Ҝ24ёцТФЙПөДLEDөЖЈ¬ҙпөҪАнПлөДПФКҫР§№ыЎЈ
1.өзИЭҙҘГюЧӘВЦКөПЦ·Ҫ°ё
MSP430өзИЭҙҘГюЧӘВЦ·Ҫ°ёНЁ№э4ёцIOҝЪНкіЙ4ёцНЁөАөДөзИЭјмІвЈ¬ЕдәПМШКвөДөзј«НјРОЈ¬ҫНҝЙКөПЦЧӘВЦөДЙијЖЎЈ
1.1 өзИЭҙҘГюКөПЦФӯАн
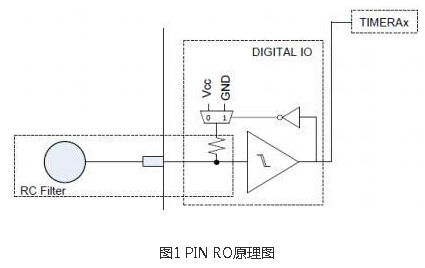
MSP430ёщҫЭРНәЕөДІ»Н¬Ц§іЦ¶аЦЦөзИЭҙҘГюјмІв·ҪКҪЈ¬УРRCХрөҙЎўұИҪПЖчЎўPIN ROЈ¬ ұҫЙијЖК№УГөДКЗPIN Relaxation Oscillator·ҪКҪЈ¬ФӯАнИзНј1Ј¬РҫЖ¬№ЬҪЕДЪІҝјмІвөзВ·УЙК©ГЬМШҙҘ·ўЖчЎў·ҙПтЖчЈ¬ТФј°Т»ёцөзЧиЧйіЙЈ¬ХрөҙРЕәЕҫӯ№эК©ГЬМШҙҘ·ўЖчұдіЙВціеРЕәЕЈ¬ФЩНЁ№э·ҙПтЖч·ҙАЎ»ШRCөзВ·Ј¬НЁ№эTimer_A¶ФК©ГЬМШҙҘ·ўЖчөДКдіцҪшРРјЗКэЈ¬ФЩНЁ№эЙиЦГІвБҝҙ°ҝЪGate»сөГјЗКэөДҪб№ыЎЈөұКЦЦёҙҘГюөзј«Ј¬өзј«ЙПөДCІъЙъұд»ҜЈ¬өјЦВХрөҙЖөВКёДұдЈ¬ХвСщФЪ¶ЁіӨөДІвБҝҙ°ҝЪҫНДЬ»сөГІ»Н¬өДјЗКэҪб№ыЈ¬Т»ө©ІоЦөі¬№эГЕПЮЈ¬ҪбәПТ»¶ЁөДВЛІЁЛг·ЁЕР¶ПҫНҝЙТФҙҘ·ўҙҘГюКВјюЎЈ
1.2 ЧӘВЦЛг·Ё
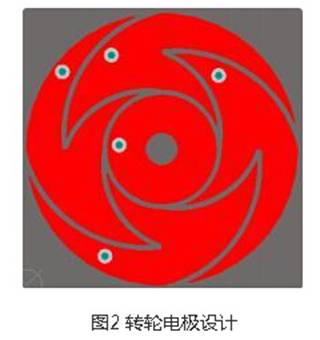
Ҫ«4ёц°ҙјьөзј«°ҙХХНј2ҫвіЭЧҙҪ»ІжҫНРОіЙБЛТ»ёцЧӘВЦөДөзј«Ј¬ЧӘВЦөДҙуРЎёщҫЭІъЖ·ЙијЖөДРиТӘҝЙҪшРРККөұөДЛх·ЕЈ¬Нј2өДНјРОЙијЖККәП30mmЧуУТЦұҫ¶өДЧӘВЦЎЈ
өұУГ»§ФЪЧӘВЦЙПІЩЧчөДКұәтЈ¬ФЪКЦЦё¶ФУҰО»ЦГөДөзј«»б»сөГЧоёЯөДРЕәЕЦөЈ¬КЦЦёБЩҪьөДНЁөА»бУРПа¶ФёЯөДРЕәЕЦөЈ¬АлКЦЦёЧоФ¶өДНЁөАјмІвөҪөДРЕәЕЦөЧоРЎЈ¬ИзНј3ЛщКҫЈә
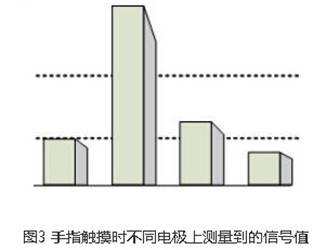
ХвКұҝЙТФАыУГІ»Н¬НЁөАЙПРЕәЕЦөөДІ»Н¬јЖЛгіцКЦЦёФЪЧӘВЦ»т»¬МхЙПөДО»ЦГЎЈО»ЦГјЖЛгІҪЦиИзПВЈә
a.УГЕЕРт·Ҫ·ЁХТіц4 ёцөзј«ЦРРЕәЕЧоҙуөДөзј«
index = Dominant_Element(groupOfElements, &measCnt[0]);
b.Ҫ«ХТөҪөДХвёцөзј«өДРЕәЕјУЙППаБЪөзј«өДРЕәЕ
position = measCnt[index] + measCnt[index+1] + measCnt[index-1];
ПајУәуөДҪб№ыИз№ыҙуУЪГЕПЮЈ¬ҫНИПОӘУРҙҘГюКВјюІъЙъЈ¬јМРшәуРшөДО»ЦГјЖЛгЎЈ °СЗ°әуРЕәЕПајУөДФӯТтКЗКЦЦёФЪІЩЧчөД№эіМЦРУРҝЙДЬҙҰУЪБҪёцөзј«ЦРјдЈ¬ХвСщБҪёцөзј«ЙПөГөҪөДРЕәЕ¶јІ»»бәЬёЯЈ¬РиТӘ°СРЕәЕПајУІЕҝЙТФУлГЕПЮЧцұИҪПЎЈ
c.јЖЛгО»ЦГЧшұкКұПИёщҫЭЙёСЎіцөДindex ЦөөГөҪТ»ёцҙуФјөДО»ЦГЈ¬ФЩёщҫЭindex өДПаБЪөзј«РЕәЕЗҝ¶ИҪшРРРЮХэЈ¬өГөҪЧоәуөДЧшұкЦө
position = index*(groupOfElements->points/groupOfElements->numElements);
position += (groupOfElements->points/groupOfElements->numElements)/2;
position += (measCnt[index+1]*(groupOfElements->points/groupOfElements->numElements))/100;
position -= (measCnt[index-1]*(groupOfElements->points/groupOfElements->numElements))/100;
d.Хл¶ФindexОӘ0»тХЯ3өДЗйҝцҙъВлРиТӘБнНвҙҰАнЈ¬І»№эјЖЛг·Ҫ·ЁәНЙПКцКЗТ»ЦВөДЎЈ
ХвАпЧӘВЦөД·ЦұжВКЈ¬јҙЧӘВЦТ»ИҰ·ЦОӘ¶аЙЩёц¶ОКЗёщҫЭpointsЙи¶ЁөДЈ¬јЩЙиУГ»§Ц»РиТӘЗш·Ц24ёцО»ЦГЈ¬ҫНҝЙТФЙиpointsОӘ24Ј¬өұИ»ТІҝЙТФЙиОӘ64Ј¬128Ј¬ЙхЦБёьёЯЈ¬ХвИЎҫцУЪЧӘВЦөДҙуРЎЈ¬өзј«НјРОөДЙијЖТФј°өзј«өД¶аЙЩЈ¬АэИзРиТӘАаЛЖ1024ХвЦЦёЯҫ«¶ИЈ¬РиТӘФцјУөзј«КэҙУ4ёцөҪ8ёц»тХЯёь¶аЎЈ
2.LED PWMЗэ¶Ҝ·Ҫ°ёКөПЦ
ТӘКөПЦLEDәфОьөДР§№ыЈ¬ҫНТӘЗуLEDҪшРРPWMөч№вЈ¬¶шТӘКөПЦ№мјЈөЖөДР§№ыЈ¬ГҝТ»В·LEDұШРлКЗ¶АБўөДPWMҝШЦЖЎЈ
ұҫУҰУГУЙУЪК№УГБЛ24ёцLEDөЖЈ¬РиТӘ24В·өДPWMКдіцҝШЦЖЈ¬MSP430G2955УР32ёцIOҝЪЈ¬НЁ№эIOҝЪЕдәПTIMER¶ЁКұЖчЈ¬Чг№»Ц§іЦ24В·өДИнјюPWMКдіцЎЈ
3.ЙијЖКөАэ
ұҫКөАэІЙУГөВЦЭТЗЖчMSP430G2955Ј¬НЁ№э6ёцIOНкіЙөзИЭҙҘГюјмІвЈ¬24ёцIOЗэ¶Ҝ24В·LEDЈ¬ІўФӨБфБЛНЁС¶ҝЪЎЈ ЙијЖКөАэИзНј4

3.1 өзВ·ЙијЖ
ФӯАнНјЙијЖИзНј4, MCUНЁ№эТ»ёц5VЧӘ3.3VөДLDOёшVCC№©өзЈ¬К№УГLDOөДДҝөДКЗОӘБЛұЈЦӨөзФҙөДОИ¶ЁЈ¬ИГҙҘГюөзВ·ФЪјмІвРЕәЕКұІ»»бТтОӘөзФҙөДФлЙщІъЙъ№эҙуөДРЕәЕЖ«ІоЎЈөзј«ЙПҙ®өДөзЧиЧчОӘESDұЈ»ӨЖчјюЈ¬Из№ыФЪІъЖ·Ҫб№№ЙијЖәПАнөДЗйҝцПВҝЙТФКЎИҘЎЈөзВ·ЦРФӨБфБЛUARTҝЪУлЦчҝШПөНіНЁС¶ЎЈ
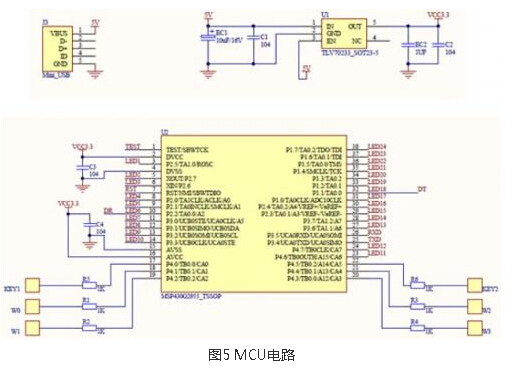
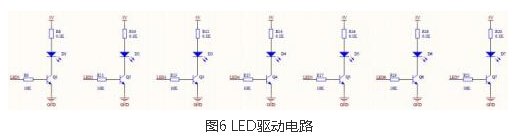
LEDЗэ¶ҜІҝ·ЦөзВ·ИзНј5,УЙУЪГҝТ»ёцLEDөДөзБчФЪ10mAЧуУТЈ¬24ёцLEDИз№ыН¬КұББҫНУР240mAЈ¬ОЮ·ЁНЁ№эMCU IOҝЪЦұҪУЗэ¶ҜЈ¬ФЪГҝёцLEDЙПјУТ»ёцИэј«№ЬТФј°ПЮБчөзЧиЈ¬КөПЦ24В·LEDөДҝШЦЖЎЈ
3.2 ҙъВлЙијЖ
3.2.1 LEDЗэ¶Ҝ
ФЪұаРҙҙъВлҝШЦЖLEDөгББКұРтЗ°Ј¬ПИ¶ЁТеәГPWMКдіцПа№ШөД№жёсЈә
PWMКдіцХјҝХұИЙиЦГОӘ50%ЎЈ
ЖөВКОӘ5KHz, ББ¶ИөДөИј¶·ЦОӘ24ј¶Ј¬0ј¶өДКұәт№ШұХLEDЈ¬23өДКұәтЧоББЎЈ
К№УГ2ёцTIMERҪшРРPWMКдіцөДҝШЦЖЎЈ
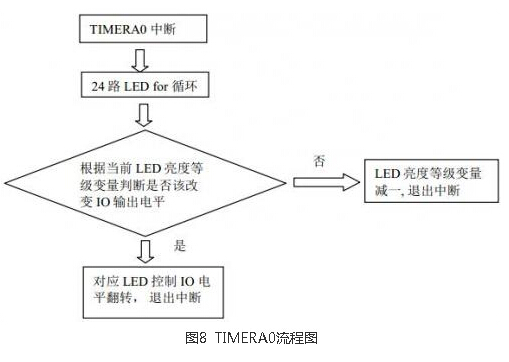
TIMERA0ЦР¶ПЖөВКОӘ24X5KHz=120KHz.
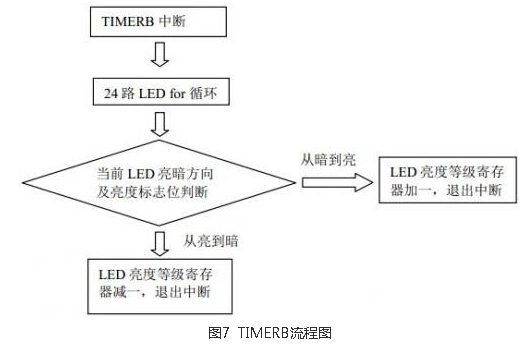
TIMERBЦР¶ПјдёфЙиОӘ10msЈ¬ФЪTIMERBЦРҪшРРLEDББ¶ИөИј¶өДёДұдЎЈ
НЁ№эБҪёцTIMERөДЦР¶ПЕдәПЈ¬ҫНҝЙТФНкіЙ24В·¶АБўPWMКдіцөДҝШЦЖЎЈөұУРҙҘГюКВјюІъЙъКұЈ¬ёщҫЭҙҘГюО»ЦГ¶Ф¶ФУҰөДLEDҪшРРББ¶ИөИј¶ёіЦөЈ¬И»әуФЪTIMERBөДЦР¶ПЦРИГББ¶ИөИј¶ВэВэјхЙЩЦББгЈ¬ХвСщҫНҝЙТФКөПЦКЦЦёАлҝӘөзј«ә󣬶ФУҰLEDВэВэұд°өөДР§№ыЎЈ
ФЪБҪёцTIMERЦР¶ПАпөДіМРтБчіМНјИзПВНј7әННј8
3.2.2 ЧӘВЦ
өВЦЭТЗЖчөДөзИЭҙҘГюИнјюҝвЦ§іЦөзИЭ°ҙјьөДРЕәЕјмІвТФј°ЧӘВЦЧшұкөДјЖЛгЈ¬НЁ№эИнјюҝвПа№ШІОКэөДЕдЦГТФј°әҜКэөДөчУГҫНҝЙТФөГөҪөұЗ°ҙҘГюКВјюөДО»ЦГЦөЈ¬ҝЙТФІОҝјөВЦЭТЗЖчөДҙҘГю°ҙјьИнјюҝв»сөГПкПёҪйЙЬЎЈ
өұУГ»§ФЪЧӘВЦЙПЧц»¬¶ҜІЩЧчЈ¬LEDөД№мјЈПФКҫУҰёГКЗNёцөЖН¬Кұұ»өгББЈ¬КЦЦёЛщФЪО»ЦГөДөЖЧоББЈ¬Ц®З°»¬№эөД№мјЈЙПөДөЖТ»ёцұИТ»ёц°өЈ¬NөДКэЦөУЙІЩЧчХЯ»¬¶ҜөДЛЩ¶Иҫц¶ЁЈ¬Из№ы»¬өДЛЩ¶И№»ҝмЈ¬24ёцLEDөЖ»бН¬Кұұ»өгББЈ¬Ц»КЗББ¶ИІ»Н¬ЎЈ
ФЪ»¬¶ҜәЬҝмөДІЩЧчКұ»бҙшАҙТ»ёцОКМвЈ¬өзИЭ°ҙјьЙЁГиөДЦЬЖЪёъІ»ЙП»¬¶ҜөДЛЩ¶ИЈ¬өјЦВЧшұкөДұд»ҜІ»КЗБ¬РшөДЈ¬Ҫб№ыҫНКЗLEDөД№мјЈІ»Б¬№бЈ¬ФЪБ¬РшөДNёцLEDЦРУРІҝ·ЦГ»УРұ»өгББЎЈОӘБЛҪвҫцХвёцОКМвРиТӘФЪЧӘВЦЧшұкјЖЛгәујУИлТ»ёцІеЦөЛг·ЁЈ¬ФЪУГ»§ІЩЧч№эҝмөДКұәт¶Фұ»В©өфөДЧшұкҪшРРІ№ЦөЈ¬К№өГLEDөД№мјЈБ¬РшЎЈ
ІеЦөөД·Ҫ·ЁҝЙТФНЁ№эөұЗ°О»ЦГәНЙПТ»ҙОО»ЦГөДұИҪПЈ¬ҫц¶ЁКЗ·сТӘҪшРРІеЦөЈ¬ХвАпРиТӘЙиЦГТ»ёцІеЦөГЕПЮInterpolationThresholdЈ¬өұО»ЦГМш¶ҜҫаАлі¬№эГЕПЮҫНІ»ҪшРРІеЦөЈ¬·ҙХэОуІЩЧчІъЙъЎЈ
if((WheelPosition-LastPosition)< InterpolationThreshold)
for (j=1;j<=(WheelPosition-LastPosition+1);j++)
SetLightLevel(LastPosition+j);
іэҙЛЦ®НвЈ¬»№РиТӘ¶ФБҪёцМШКвЗйҝцЧцҙҰАнЈ¬ј°ХэПтәН·ҙПт»¬¶ҜІЩЧчҫӯ№эЧӘВЦЧшұк0өгЎЈ
4.ЧЬҪб
ұҫОДҪйЙЬБЛК№УГMSP430GПөБРөҘРҫЖ¬КөПЦөзИЭҙҘГюЧӘВЦәН24В·¶АБўPWMКдіцLEDҝШЦЖ·Ҫ°ёЈ¬ФЪТ»Р©РиТӘөНіЙұҫөДІъЖ·ЙијЖЈ¬УЦТӘ¶Ф¶аЦЦLEDМШР§ҝШЦЖөДіЎәПЈ¬УРәЬҙуөДК№УГјЫЦөЎЈ
|

