|
我喜欢模块化,因此我使用2个独立的自制板构建了电子设备:主控板和电动机板。 机器人的主控板基于Arduino Pro Mini。我之所以选择此板,是因为它小巧,便宜且带有Atmega32u4芯片。机械手控制需要两个16位硬件计时器,而Atmega328只有一个,而Atmega32u4只有两个。因此,如果您打算复制此机器人,则必须选择Atmega32u4板(Pro micro或Leonardo)。 MPU-9250 IMU使用I2C连接到Arduino。我还路由了3条额外的I2C总线用于将来的升级。 HC-05使用Arduino的第二个硬件串行端口(D0 / D1),而第一个硬件串行端口由micro-USB使用以对开发板进行编程。 后来,我又使用了2个数字引脚为SR-04超声波传感器接线,但效果不是很好。因此,我改为在模拟引脚上使用了Sharp gp2y0a21f IR传感器(在原理图上看不到它,因为它目前基本上可以正常工作,但它存在于github的arduino代码中)。 为手臂供电的微伺服使用D10 PWM引脚。
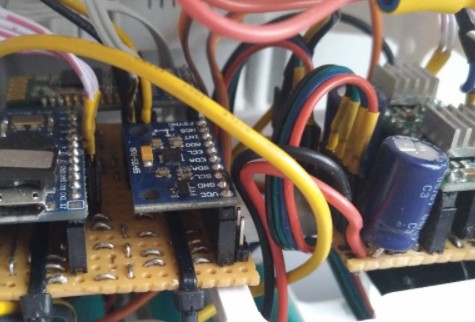
马达板基于两个来自RAMPS 3D打印机套件的A4988步进驱动器 两个A4988步进驱动器均使用2个数字引脚分别用于速度和方向,并且都共享一个额外的数字引脚以启用或禁用电动机。我在每个驱动程序上添加了3个跳线来调整微步设置,但是我使用的是1/16(机器人也可以在1/8上工作)。另外两个100μF电容器有助于平滑流向电动机的电流,主控和马达板,红外传感器和微型伺服器均由LM7805稳压器及其两个10pF电容器供电。 后来我添加了12V 3 LED灯带,它直接连接到3x18650电池输出上。
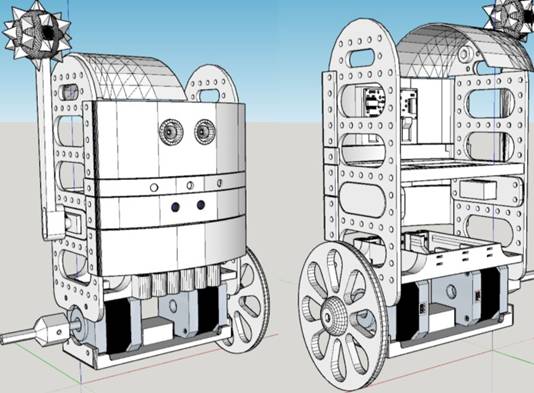
机器人的框架和配件是全3D设计和打印的。我希望该机器人具有高度的模块化,并且易于定制和维修。
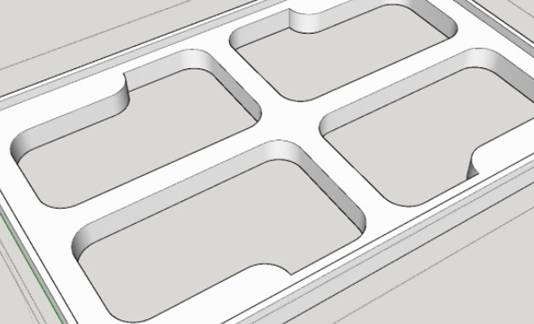
您需要打印: 2x身体侧面 1x马达板 2倍大托盘 2x车轮 其他零件是可选的(保险杠,SR-04超声波传感器支架,锋利的gp2y0a02yk传感器支架,LED灯带支架,机械臂)。如果您打算像我以后那样使用可回收的RC车轮,则还需要2个轴驱动部件,或者如果我的车轮不适合您,则设计您自己的。 使用3毫米螺钉和螺母将所有东西固定在一起。我设计的机器人只需使用螺丝刀即可轻松组装或拆卸:只需在每个托盘的插槽中放一个螺母,它将充当扳手。
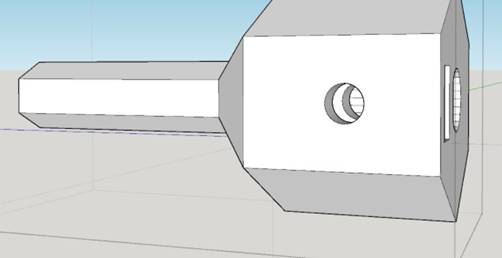
如果您打算使用3D打印的车轮并且轴孔太大,则可以在电动机的轴上添加一些热胶,这样会很好地固定车轮。您将需要2个橡皮筋来装轮胎,否则机器人会在地面上滑动。 如果使用我的轴驱动部件,则必须在矩形槽中放入3mm的螺母,并且3mm的螺钉将轴驱动器挡在电动机轴的平坦部分上。
电子零件:
-Arduino专业版微大脑。任何基于Atmega32u4的arduino都可以工作,但不能运行Atmega328,因为它需要2个硬件计时器
-MPU-9250惯性测量单元:单个芯片中的陀螺仪,加速度计和磁力计。磁力计部件尚未使用。
-HC-05蓝牙模块:用于与Android智能手机/平板电脑通信
-2x NEMA 17 12V步进电机:高扭矩和高精度电机,非常适合此类机器人
-2个A4988步进电机驱动器+ 2个100uF去耦电容器:允许1/16步进,具有可调限流,过流和过热保护,并且工作电压为8至35V
-1个L78M05 5V稳压器+ 2个1 uF电容器:为“大脑”部分和伺服提供5V
-1个12G微型伺服器:上下移动“手臂”,并允许机器人自行站立 机械零件 -3D打印框架; 允许快速更改,维修和大量自定义。使用Sketchup软件设计
-回收的RC汽车或3D打印的车轮:直径10厘米 功率
-3个可回收的18650锂离子电池 遥控
-蓝牙电子Android应用
|

