|
直流电机驱动芯片的选择
一、用的最多的一个H桥驱动芯片:L928N
这个芯片是很简单,很便宜,而且很容易买到,一个芯片里面就集成了2路的H桥电路,还带PWM控制和电流采集。但是它有2个严重的缺点:
1)手册要求电机驱动电压要比控制逻辑电压高2.5V。不适合单电源供电的小车。
2)在H桥电路上的损耗太大了。
二、三极管H桥
最简单实用的电路,我拆了几辆玩具车,用的都是三极管H桥电路。
小功率的采用8550+8050的桥:在5V供电,驱动100mA左右的小电机时,桥上的压降小于0.5V。
电流较大的采用D772+D882的桥:在7.2V供电,200-300mA的电流下,压降不到1V。
三、MOS管桥
MOS管效率肯定是最高的。但是存在两个问题:
1)MOS管比较脆弱,使用时候需要非常注意,例如导通切换的时候要仔细研究时序,否则容易造成桥直通,烧毁MOS管;
2)大功率的MOS管门极需要比较高的驱动电压,否则不能正常导通,所以用电池驱动时,还需要加升压电路等。
L298N直流电机驱动芯片
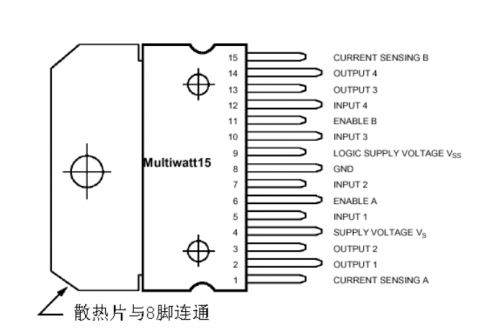
L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。
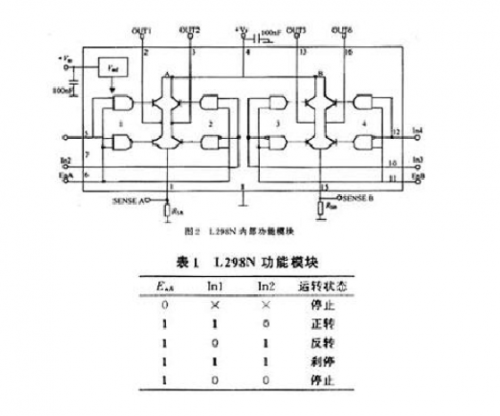
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46 V。输出电流可达2.5 A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。表1是L298N功能逻辑图。
In3,In4的逻辑图与表1相同。由表1可知EnA为低电平时,输入电平对电机控制起作用,当EnA为高电平,输入电平为一高一低,电机正或反转。同为低电平电机停止,同为高电平电机刹停。 L298控制器原理如下:
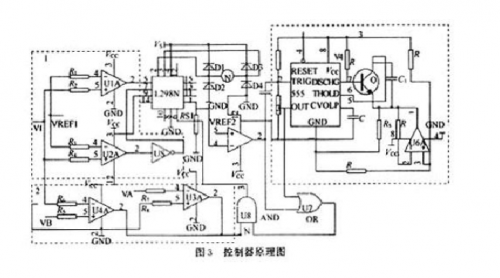
图3是控制器原理图,由3个虚线框图组成。
下面是3个虚线框图功能:
(1)虚线框图1控制电机正反转,U1A,U2A是比较器,VI来自炉体压强传感器的电压。当VI>VRBF1时,U1A输出高电平,U2A输出高电平经反相器变为低电平,电机正转。同理VI<VRBF1时,电机反转。电机正反转可控制抽气机抽出气体的流量,从而改变炉体压强。
(2)虚线框图2中,U3A,U4A两个比较器组成双限比较器,当VB<VI<VA时输出低电平,当VI>VA,VI<VB时输出高电平。VA,VB是由炉体压强转感器转换电压的上下限,即反应炉体压强控制范围。根据工艺要求,我们可自行规定VA,VB的值,只要炉体压强在VA,VB所确定范围之间电机停转(注意VB<VRBF1<VA,如果不在这个范围内,系统不稳定)。
(3)虚线框图3是一个长延时电路。U5A是一个比较器,Rs1是采样电阻,VRBF2是电机过流电压。Rs1上电压大于VREF2,电机过流,U5A输出低电平。由上面可知,框图1控制电机正反转,框图2控制炉体压强的纹波大小。当炉体压强太小或太大时,电动机转到两端固定位置停止,根据直流电机稳态运行方程[3]
: U=CeФN+RaIa
其中:Ф为电机每极磁通量;
Ce为电动势常数;
N为电机转数;
Ia为电枢电流;
Ra电枢回路电阻。
电机转数N为0,电机的电流急剧增加,时间过长将会使电机烧坏。但电机起动时,电机中线圈中的电流也急剧变大,因此我们必须把这两种状态分开。长延时电路可把这两种状态区分出来。长延时电路工作原理:当Rs1过流U5A产生一个负脉冲经过微分后,脉冲触发555的2脚,电路置位,3脚输出高电平,由于放电端7脚开路,C1,R5及U6A组成积分器开始积分,电容C1上的充电电压线性上升,延时运放积分常数为100R5C1。当C1上充电电压,即6脚电压超过2/3 VCC,555电路复位,输出低电平。电机启动时间一般小于0.8 s,C1充电时间一般为0.8~1 s。U5A输出电平与555的3脚输出电平经U7相或,如果U5A输出低电平大于C1充电时间,U7在C1充电后输出低电平由与门U8输入到L298N的6脚ENA端使电机停止。如果U5A的输出电平小于C1充电时间,6脚不动作电机的正常启动。长延时电路吸收电机启动过流电压波形,从而使电机正常启动。
下图是其引脚图:
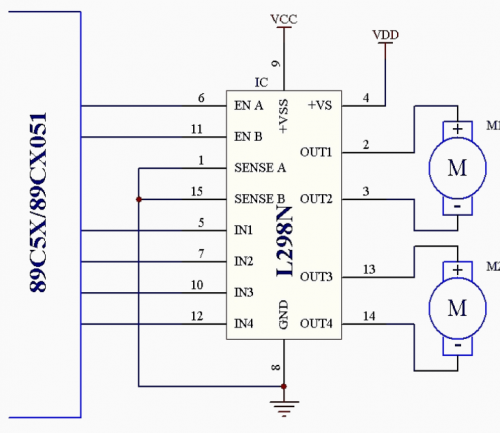
1、15脚是输出电流反馈引脚,其它与L293相同。在通常使用中这两个引脚也可以直接接地。上图是其与51单片机连接的电路图
|