|
想象一下您今早开车上班的路上:交通灯变绿,您立刻踩下油门,车在几秒钟内快速响应,继续驶向公司。这个过程看似简单,但实际上,车内却发生了一系列的复杂操作。让我们一起来看看吧。
当您踩下踏板时,电机将通过转轴向车子提供必要的扭矩,随后牵引电机驱动车辆前进。牵引电机(通常为三相同步电机)由复杂的电路控制,包括多个晶体管、电机驱动器,以及保护和反馈控制。反馈控制信号由电机位置传感器(见图1)以模拟角度输出信号的形式发出(注意,所有现实世界的信号都是模拟的)。借助于模拟-数字转换器(ADC),连续的模拟信号被转换成数字域。理想的情况下,您可以将连续的模拟信号分解成无限数量的数位步进,但在现实世界中,ADC的模拟信号量化是有限的数量步进,而由此导致的误差称为量化误差。这里便涉及到“精度”和“分辨率”这两个术语。
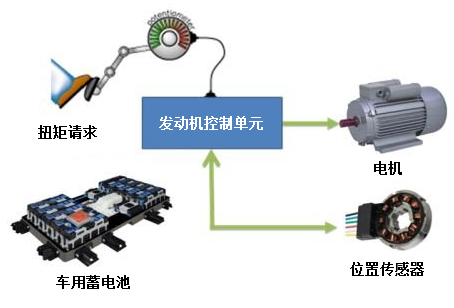
图1:车辆电机控制系统的典型系统框图
精度
以12位轴角数字转换器(RDC)为例。转轴转动一圈,转换器输出212 = 4096个数字码。在电机控制中,步长通常以弧分或弧秒来定义。一度60分钟,一转360度。因此,一圈上有360×60 = 21600个弧分。由于存在4096个数字码,所以每个分区以= 21600/4096,即5.27弧分为间隔。5.27弧分对应于一个最低有效位或1LSB。因此,即使输入角度(连续信号)是100%准确的,输出数字码在下一个代码前的移动也不能超过1LSB(或5.27弧分)。RDC在指定该精度值时会考虑偏移、增益和线性误差因素。作为参考,无刷旋转变压器的典型精度规格为10弧分。整个解析装置系统的典型误差,加上传感器和转换误差,大约为±15.273弧分(解析传感器为10弧分,而我的示例中为+5.273弧分)。这些数字将有助于我们为系统选择合适的传感器解决方案。
分辨率
那么,分辨率是什么?“12位”分辨率是指360度角旋中212个不同的输出码。 实际分辨率只是RDC输出端的可用位数;请注意,并不是所有位都是无噪声的。有效分辨率是指在考虑到信号噪声的情况下模拟数字转换中的真正“有用”位。这些是有效位数(ENOB)。 ENOB经常与产品数据表中所述的分辨率混淆。
1 LSB是什么意思?
到目前为止,我们已经讨论了精度和分辨率的定义。 现在,让我们将这些知识应用到一个系统中,在该系统中精度和分辨率通常以LSB为单位。您想知道系统环境中LSB的含义吗?首先,我们来看一下电机控制领域中1 LSB相对弧分和度数的转换值。 以下以12位和10位为例:
在12位中,1 LSB等于:
1LSB = 360 ÷ 212 = 0.087度= 5.27弧分= ±2.64弧分= ±0.04395度
同理,在10位中,1 LSB等于:
1LSB = 360 ÷ 210 = 0.351度= 21.09弧分= ±10.54弧分= ±0.1757度
结论
了解汽车操作背后的深层次原理是不是一件很有趣的事?精度和分辨率是为您的规格选择合适的传感解决方案的基础。 当精度优于分辨率时,转换器的转移函数可以通过分辨率位数实现精确控制。
|

