|
ʲô������Ӧ�˲���
����Ӧ�˲������ܹ����������ź��Զ��������ܽ��������źŴ����������˲�������Ϊ�Աȣ�������Ӧ�˲����о�̬���˲���ϵ������Щ��̬ϵ��һ����ɴ��ݺ�����
����һЩӦ����˵���������Ȳ���֪������Ҫ���в����IJ���������һЩ�����źŵ����ԣ�����Ҫ��ʹ������Ӧ��ϵ�����д���������������£�ͨ��ʹ������Ӧ�˲���������Ӧ�˲���ʹ�÷����������˲���ϵ���Լ�Ƶ����Ӧ��
�ܵ���˵������Ӧ�Ĺ����漰�������ۺ�������ȷ����θ����˲���ϵ���Ӷ���С��һ�ε������̳ɱ����㷨����ֵ�������˲���������ܵ��ж������С�����ź��е������ɷֵ�������
���������źŴ��������ܵ���ǿ������Ӧ�˲�����Ӧ��Խ��Խ������ʱ�����������Ѿ��㷺�������ֻ��Լ�����ͨ���豸������¼���������������Լ�ҽ�Ƽ���豸�С�
����ͼʾ�Ŀ�ͼ����С�����˲���(LMS)�͵ݹ���Сƽ��(en:Recursive least squares filter��RLS��������ƽʱ˵����С���˷�)��Щ��������Ӧ�˲���ʵ�ֵĻ�������ͼ�����ۻ����ǿɱ��˲����ܹ��õ���Ҫ�źŵĹ��ơ�
����Ӧ�˲�����4�ֻ���Ӧ�����ͣ�
1) ϵͳ��ʶ����ʱ�ο��źž���δ֪ϵͳ��������������Сʱ����ʱ����Ӧ�˲�������δ֪ϵͳ������������ԣ�����Ӧ�˲��������ṩһ����ij���������ܹ�������δ֪װ�õ�����ģ��
2) ��ģ�ͣ�������Ӧ���У�����Ӧ�˲������������ṩһ����ģ�ͣ���ģ�Ϳ���ij��������������δ֪����װ�á�����أ�������ϵͳ������£�����ģ�;��е���δ֪װ��ת�ƺ���������ת�ƺ�����ʹ�ö��ߵ���Ϲ���һ������Ĵ���ý�顣��ϵͳ������ӳٹ�������Ӧ�˲�����������Ӧ����ijЩӦ���У���ϵͳ���벻���ӳٵ�����������Ӧ��
3) Ԥ�⣺������Ӧ���У�����Ӧ�˲����������Ƕ�����źŵĵ�ǰֵ�ṩij�������ϵ�һ�����Ԥ�⡣���ǣ��źŵĵ�ǰֵ��������Ӧ�˲�����������Ӧ���źŵĹ�ȥֵ�ӵ��˲���������ˡ�ȡ���ڸ���Ȥ��Ӧ�ã�����Ӧ�˲���������������������Ϊϵͳ��������ڵ�һ������£�ϵͳ��Ϊһ��Ԥ����;���ں�һ������£�ϵͳ��ΪԤ������˲�����
4) ������������һ��Ӧ���У�����Ӧ�˲�����ij�������ϵ����Ż���ʽ���������ڻ����ź��е�δ֪���š������ź���������Ӧ�˲�����������Ӧ���ο��ź������˲��������롣�ο��ź����Զ�λ��ijһ��������һ�鴫���������Գ�����Ϣ���ź������Ļ��������Ԥ��ķ�ʽ�����������ź��ϡ�
��Ҳ����˵���õ������������������������Ӧ�˲�����Ŀ�ģ���������Ŀ���ǵõ�δ֪ϵͳģ�͡��õ�δ֪�ŵ��Ĵ��ݺ����ĵ������õ�δ���źŻ����͵õ��������ŵ�ԭ�źš�
����Ӧ�˲�ͨ�㽲���ǻ���ź��������źŵıƽ����ڱƽ��Ĺ����У����ݹ۲��ź�����ʵ(����)�źŵľ������(MSE)Ϊ����ָ�꣬����һ��������е���(���������Լ������趨)��ֱ���㷨����(���������кܶ࣬����ﵽԤ���趨�ĵ�����������ﵽ����������)�����еij�������Ӧ�㷨��RLS��LMS��NLMS���������ǰ����ݶ��½�����ţ�ٷ����е�����
�㷨����
������˲��㷨����ά���˲����������˲�����Щ�˲��㷨����Ҫ�������źŵ����ϵ�����������ʵȲ������й��ƣ���ʵ���к���ʵ����Щ������ȷ���ƣ�����Щ������ȷ����ֱ��Ӱ�쵽�˲������˲�Ч������һ���棬�������˲���һ�������ɣ������㲻�ɸı䣬ʵ��Ӧ���У�ϣ���˲����IJ����ܹ����������źŵı仯���ı䣬��ȡ�ýϺõ�ʵʱ�Դ���Ч����Ϊ���ֲ���ͳ�˲��㷨�IJ��㣬�����źŴ�����Ҫ���ַ�չ������Ӧ�˲���
�㷨����ԭ��
����Ӧ�˲���ά���˲����������˲������������ڣ�����Ӧ�˲���������˲�ϵͳ֮������з���ͨ��������ijһʱ���˲���������������źŵ��������˲�����ϵ�����Ӷ�ʵ���˲���ϵ���Ķ�̬������ʵ�������˲���
(1)�ź�ģ��
����Ӧ�˲���Ŀ����Ȼ�Ǵӹ۲��ź�����ȡ��ʵȷ�������źţ�����漰�����ź��У�
�����ź� d(n)
�����ź� x(n)=d(n)+v(n)
����ź� y(n)
(2)�㷨ԭ��
һ��M���˲�����ϵ��Ϊw(m)�������Ϊ��
y(n)=��w(m)x(n-m) m=0��M
д�ɾ�����ʽ�� y(j)=WT(j)*X(j)
nʱ�̵�������Ϊ�� e(j)=d(j)-y(j)= d(j)- WT(j)*X(j)
����Ŀ�꺯��Ϊ E[e(j)^2]�����У�
J(j)=E[e(j)^2]= E[(d(j)- WT(j)*X(j))^2]
���������ﵽ��Сʱ����ʵ�������˲�������Ŀ�꺯��ȷ����Ϊ��С��������Ӧ�˲���
����Ŀ�꺯��J(j)����Ҫ���ʹ��ȡ����Сֵ��Ӧ��W������ʹ���ݶ��½����������Ż���
W(j+1)=W(j)+1/2*��(-��J(j))
��J(j)=-2E[X(j)*( d(j)- WT(j)*X(j))]= -2E[X(j)e(j)]
W(j+1)=W(j)+��E[X(j)e(j)]
����-2X(j)e(j)��Ϊ˲ʱ�ݶȣ���Ϊ˲ʱ�ݶ�����ʵ�ݶȵ���ƫ���ƣ��������ʹ��˲ʱ�ݶȴ�����ʵ�ݶȡ�
W(j+1)=W(j)+��X(j)e(j)
�ɴˣ����Եõ�����Ӧ�˲����ϵ���ĵ�����ʽ��
3.�㷨��������
����С�����������Ӧ�˲��㷨�У�����˲���ϵ��Ӧ�����㣺
��J(j)=0
����-2E[X(j)*( d(j)- WT(j)*X(j))]=0
���������Եõ���
WoptT =Rxx-1*Rxd
��ʽ˵��������Ӧ�˲�������˲���ϵ��ͬά���˲���ͬ���������ź��Լ������źŵ���ؾ����йء�
��W(j+1)=W(j)+��X(j)e(j)�Ⱥ���������������ͨ��һϵ���Ƶ����ɵã�
E[W(j+1)]=Wopt+Q(I-�̦�)jQH(W0-Wopt)
ʽ��Rxx=QH��Q�� W0Ϊ����Ӧ�˲�ϵ���ij�ֵ��
��jȡ�������ʱ���˲���Ӧ�ﵽ����״̬����ˣ�
(I-�̦�)j=0�����У�|I-�̦�|��=1
��ʽ��Ϊ��С��������Ӧ�˲�������������
��Ϊ�����źŵ�����ؾ���Rxx������ֵ���ɵĶԽ���
4.�䲽������Ӧ�˲��㷨
���������������У���������������Ϊ�������㷨��Ϊ�˱�֤�㷨�������ԣ�һ��Ҫȡһ���Ƚ�С�IJ���ֵ����������С���������㷨�����������Ƚ����������ǣ��ڵ����ij�ʼ�Σ����ֵ�ϴ�ʱ��ȡһ���ϴ�ĵ�����������ʵ�ֽϿ�������ٶ�;���ŵ����������ӣ������С������ҲӦ��Ӧ��С���ﵽ�ϸߵ��������ȡ�����˼����Ϊ�䲽������Ӧ�˲��㷨��
���õı䲽������Ӧ�˲��㷨���������źŵĻ������ֵȷ��������
����������־���ı䲽���㷨��
(1)��һ���䲽������Ӧ�˲��㷨
��j =��/(��+XjTXj)
�����¾�Ϊ������������0������2���¡�=0��
���㷨ʹ�������źŵ������Բ������ӽ��й�һ����ȷ����ȡ�����ʵ�ֵ��
(2)Sigmod�����䲽������Ӧ�˲��㷨
��j=��(1-exp(-��ej^2))
�����¾�Ϊ������������0������0=���¡���max��
����������ʽ�п������Կ������������������ֵҲ����
5.���������Ӧ�˲��㷨
ʵ�鷢�֣��������ź�֮�������ԱȽ�ǿʱ������Ӧ�˲���Ч���Ƚϲ�����Ҫȥ���������������ź����е�����ԣ��Եõ��Ϻõ��˲�Ч����
���������Ӧ�˲��㷨��ʵ�ֹ���Ϊ��
r= XjTXj-1/ Xj-1TXj-1
Zj=Xj-rXj-1
��j=��ej/ ZjTXj
Wj+1=Wj+��jZj
6.�任������Ӧ�˲��㷨
���ݽ��������Ӧ�˲��㷨��˼�룬ʹ��һ���������������źŽ��б任���ڱ任���Ͻ�������Ӧ�˲�������ٽ��˲������任��ʱ�������ı任�и���Ҷ�任����������Ҷ�任��С���任�����ұ任��
�㷨Ӧ����ʵ��
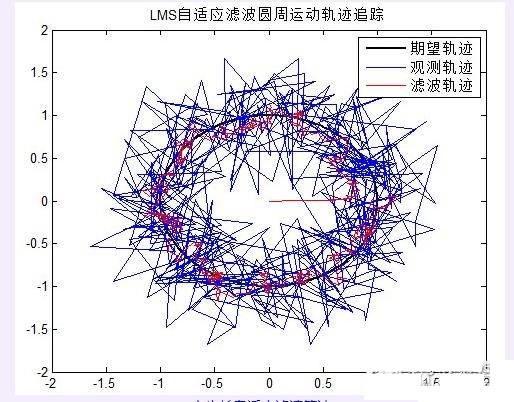
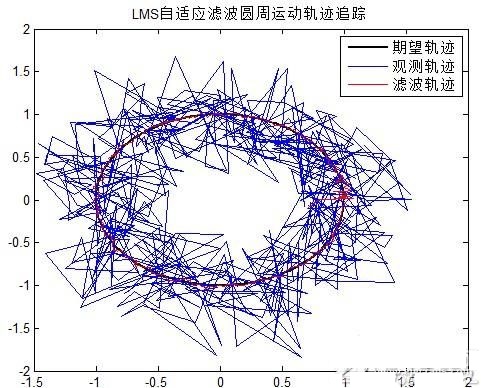
���潲�������ʵ��������Ӧ������Ӧ�˲��㷨��
���ⱳ����һ����Ŀ����x��yƽ�����Ƶ�λԲ��Բ���˶������������ţ����˶��켣������ƫ�ơ����У�x����ĸ���Ϊ��ֵΪ0������Ϊ0.05�ĸ�˹����;y�������Ϊ��ֵΪ0������Ϊ0.06�ĸ�˹������
���������˼·��
��������˶��켣�ֽ�ΪX�����Y�������������������˶���������ֱ��˶��켣��ɢΪһϵ�е㣬��Ϊ�˲��������룬�ֱ������������Ͻ����˲��������ٺϳ��˶��켣��
�������˼·��
���������ź�-��������-�����˲���ϵ����ֵ-��������-�����˲����
�˲����������
����������Ӧ�˲��㷨
�䲽������Ӧ�˲��㷨
���������Ӧ�˲��㷨
|