|
�����綯����һ�ֽ�������ת��Ϊ��λ�Ƶ�ִ�л��������������������յ�һ�������źţ�������������������趨�ķ���ת��һ���̶��ĽǶȣ�����ǶȽ����i��ǣ������ǿ���ͨ����������ĸ�������������Ľ�λ�������Ӷ��ﵽ��ȷ��λ��Ŀ��;ͬʱ������ͨ����������Ƶ�������Ƶ綯��ת�����ٶȺͼ��ٶȣ��Ӷ��ﵽ���ٵ�Ŀ�ġ�
һ���ߡ��ࡢ����
���ࡱ ����˵����������м�����Ȧ��Ҳ�������飩��
���ߡ� ����˵����������м������߿ڡ�
�����ԡ� ��Ϊ ������ �� ˫���ԡ���������������Ȧ�ǿ���˫��ģ���ô��������������˫���Եģ��෴����������������Ȧ��ֻ��������ģ���ô�������������ǵ����Եġ�
���������ֻҪ֪�������������Ϳ����ƶϳ���������
�磺
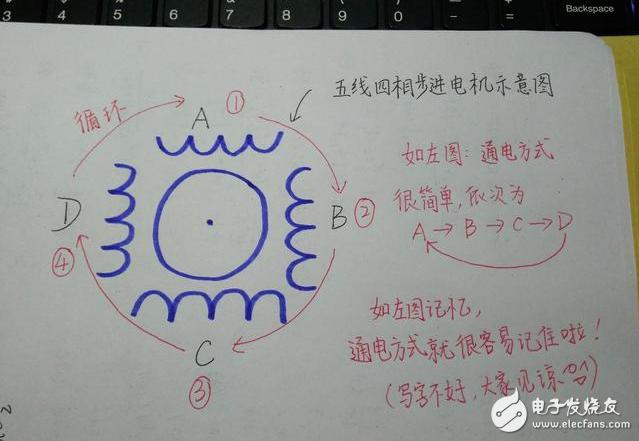
�������ಽ����� ������5�����߿ڣ�4����Ȧ��
�������������ͷ��������ͷ�ĸ�������������Ҳ����˵��һ������ͷ�ǹ�����ͷ������������Ȧ�ĵ��緽ʽ��ֻ������ ����� ���������������ǵ����Եġ�����ͼ��

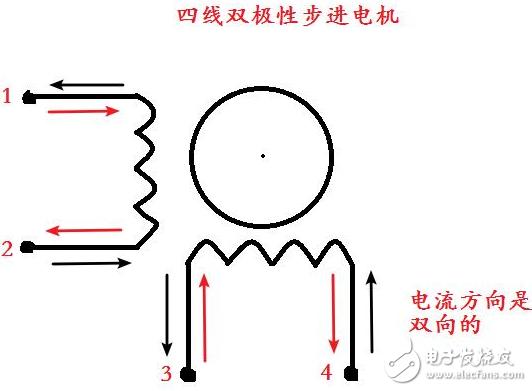
����˫���Բ������������4�����߿ڣ����緽ʽ������˫��ġ�
�������ĸ����߿ڣ��ҵ��緽ʽ��˫��ģ���������������������ġ�
������������IJ�����ʽ�����ġ�˫�ġ���˫��
1�����ģ��������Ĺ�����ʽ��
���Ĺ�����ʽ����˵ÿ��ֻ��һ����Ȧͨ�磬ͨ���ı�ÿ��ͨ�����Ȧ�Ӷ�ʹ�������ת����
��˵�������ಽ����������������ĸ���Ȧ���� A��B��C��D����ô�ڵ��Ĺ�����ʽ�£���Ȧ��ͨ�緽ʽ�����ǣ�A��B��C��D��
Ȼ��������˫���Բ����������������������Ȧ���� A��B����ô�ڵ��Ĺ���ģʽ�£���Ȧ�����ǣ�A��B��-A��-B��
��ע��A��Bָ����A��B��Ȧͨ���������-A��-Bָ����A��B��Ȧͨ��������������������ಽ�������ͨ�������������ֻ��A��B��C��D��
��Ȼ����˵�Ķ�����ֻ�����ۣ����Ǽ���Ļ���Ȼ�м�㷽����
�������������ಽ�������
����������˫���Բ��������

2��˫�ģ���˫���Ĺ�����ʽ��
˫�Ĺ�����ʽ���ǣ�ÿ�θ�������Ȧͨ�磬ͨ���ı�ͨ�����Ȧ�Ӷ�ʹ�������ת����
�������ಽ���������˫�Ĺ�����ʽ�£���Ȧ��ͨ�緽ʽ�����ǣ�AB��BC��CD��DA��
����˫���Բ����������˫�Ĺ���ģʽ�£���Ȧ��ͨ�緽ʽ�����ǣ�AB��B-A��-A-B��-BA��
��Һ������ҳ����ɰɡ�
3����˫�ģ����Ĺ�����ʽ��
��˫�Ĺ�����ʽ���ǵ��Ĺ�����ʽ��˫�Ĺ�����ʽ������С�
�������ಽ�������A��AB��B��BC��C��CD��D��DA��
����˫���Բ��������A��AB��B��B-A��-A��-A-B��-B��-BA��
���ֻҪ���������һ�������ͼ���Ϳ��Ի�����ļ�ס�ˡ�
�����˵һ�²���ǣ�
|

