|
1引言
数字化家庭是未来智能小区系统的基本单元。所谓“数字化家庭”就是基于家庭内部网络提供覆盖整个家庭的智能化服务,包括数据通信、家庭娱乐和信息家电控制功能。
数字化家庭设计的一项主要内容是通信功能的实现,包括家庭与外界的通信及家庭内部相关设施之间的通信。从现在的发展来看,外部的通信主要通过宽带接入Internet,而家庭内部的通信,笔者采用目前比较具有竞争力的蓝牙(Bluetooth)无线接入技术。
传统的数字化家庭采用PC进行总体控制,缺乏人性化。笔者根据人工情感的思想设计一种配备多种外部传感器的智能机器人,将此智能机器人视作家庭成员,通过它实现对数字化家庭的控制。
本文主要就智能机器人在数字化家庭医疗保健方面的应用进行模型设计,在智能机器人与医疗仪器和控制PC的通信采用蓝牙技术。整个系统的成本较低,功能较为全面,扩展应用非常广阔,具有极大的市场潜力。
2智能机器人的总体设计
2.1 智能机器人的多传感器系统
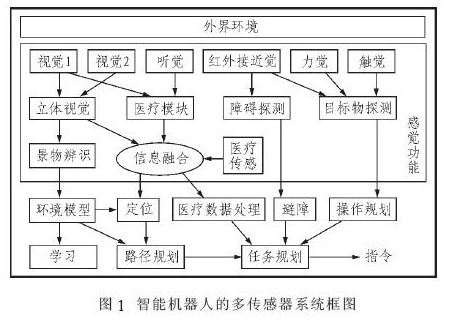
机器人智能技术中最为重要的相关领域是机器人的多感觉系统和多传感信息的集成与融合,统称为智能系统的硬件和软件部分。视觉、听觉、力
觉、触觉等外部传感器和机器人各关节的内部传感器信息融合使用,可使机器人完成实时图像传输、语音识别、景物辨别、定位、自动避障、目标物探测等重要功能;给机器人加上相关的医疗模块(CCD、CAMERA、立体麦克风、图像采集卡等)和专用医疗传感器部件,再加上医疗专家系统就可以实现医疗保健和远程医疗监护功能。智能机器人的多传感器系统框图如图1所示。
2.2 智能机器人控制系统
机器人控制系统包含2部分:一是上位机,一般采用PC,它完成机器人的运动轨迹规划、传感器信息融合控制算法、视觉处理、人机接口及远程处理等任务;二是下位机,一般采用多单片机系统或DSP等作为控制器的核心部件,完成电机伺服控制、反馈处理、图像处理、语音识别和通信接口等功能。
如果采用多单片机系统作为下位机,每个处理器完成单一任务,通过信息交换和相互协调完成总体系统功能,但其在信号处理能力上明显有所欠缺。由于DSP擅长对信号的处理,而且对此智能机器人来说经常需要信号处理、图像处理和语音识别,所以采用DSP作为智能机器人控制系统的控制器。
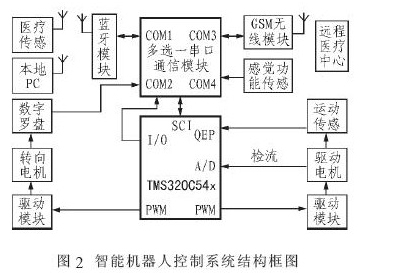
控制系统以DSP(TMS320C54x)为核心部件,由蓝牙无线通信、GSM无线通信(支持GPRS)、电机驱动、数字罗盘、感觉功能传感器(视觉和听觉等)、医疗传感器和多选一串口通信(RS-232)模块等组成,控制系统框图如图2所示。
⑴系统通过驱动电机和转向电机控制机器人的运动,转向电机利用数字罗盘的信息作为反馈量进行PID控制。
⑵采用爱立信(Ericsson)公司的ROK101007型电路作为蓝牙无线通信模块,实现智能机器人与上位机PC的通信和与其他基于蓝牙模块的医疗保健仪器的通信。
⑶支持GPRS的GSM无线通信模块支持数据、语音、短信息和传真服务,采用手机通信方式与远端医疗监控中心通信。
⑷由于TMS320C54x只有1个串行口,而蓝牙模块、GSM无线模块、数字罗盘和视觉听觉等感觉功能传感器模块都是采用RS-232异步串行通信,所以必须设计1个多选一串口通信模块进行转换处理。当TMS320C54x需要蓝牙无线通信模块的数据时通过电路选通;当TMS320C54x需要某个传感器模块的数据时,关断上次无线通信模块的选通,同时选通该次传感器模块。这样,各个模块就完成了与TMS320C54x的串口通信。
3主要医疗保健功能的实现
智能机器人对于数字化家庭的医疗保健可以提供如下的服务:
⑴医疗监护
通过集成有蓝牙模块的医疗传感器对家庭成员的主要生理参数如心电、血压、体温、呼吸和血氧饱和度等进行实时检测,通过机器人的处理系统提供本地结果。
⑵远程诊断和会诊
通过机器人的视觉和听觉等感觉功能,将采集的视频、音频等数据结合各项生理参数数据传给远程医疗中心,由医疗中心的专家进行远程监控,结合医疗专家系统对家庭成员的健康状况进行会诊,即提供望(视频)、闻、问(音频)、切(各项生理参数)的服务。
3.1 机器人视觉与视频信号的传输
机器人采集的视频信号有2种作用:提供机器人视觉;将采集到的家庭成员的静态图像和动态画面传给远程医疗中心。
机器人视觉的作用是从3维环境图像中获得所需的信息并构造出环境对象的明确而有意义的描述。视觉包括3个过程:
⑴图像获取。通过视觉传感器(立体影像的CCDCAMERA)将3维环境图像转换为电信号。
⑵图像处理。图像到图像的变换,如特征提取。
⑶图像理解。在处理的基础上给出环境描述。
通过视频信号的传输,远程医疗中心的医生可以实时了解家庭成员的身体状况和精神状态。智能机器人根据医生的需要捕捉适合医疗保健和诊断需求的图像,有选择地传输高分辨率和低分辨率的图像。在医疗保健的过程中,对于图像传送有2种不同条件的需求:
⑴医生观察家庭成员的皮肤、嘴唇、舌面、指甲和面部表情的颜色时,需要传送静态高清晰度彩色图像;采用的方法是间隔一段时间(例如5分钟)传送1幅高清晰度静态图像。
⑵医生借助动态画面查看家庭成员的身体移动能力时,可以传送分辨率较低和尺寸较小的图像,采用的方法是进行合理的压缩和恢复以保证实时性。
3.2 机器人听觉与音频信号的传输机
器人采集的音频信号也有2种作用:一是提供机器人听觉;二是借助于音频信号,家庭成员可以和医生进行沟通,医生可以了解家庭成员的健康状况和心态。音频信号的传输为医生对家庭成员进行医疗保健提供了语言交流的途径。
机器人听觉是语音识别技术,医疗保健智能机器人带有各种声交互系统,能够按照家庭成员的命令进行医疗测试和监护,还可以按照家庭成员的命令做家务、控制数字化家电和照看病人等。
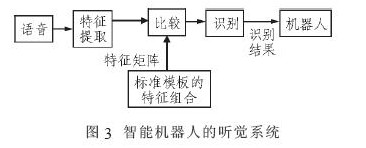
声音的获取采用多个立体麦克风。由于声音的频率范围大约是300Hz~3400
Hz,过高或过低频率的声音在一般情况下是不需要传输的,所以只用传送频率范围在1000Hz~3000Hz的声音,医生和家庭成员就可以进行正常的交流,从而可以降低传输音频信号所占用的带宽,再采用合适的通信音频压缩协议即可满足实时音频的要求。智能机器人的听觉系统如图3所示。
3.3 各项生理信息的采集与传输
传统检测设备通过有线方式连到人体上进行生理信息的采集,各种连线容易使病人心情紧张,从而导致检测到的数据不准确。使用蓝牙技术可以很好地解决这个问题,带有蓝牙模块的医疗微型传感器安置在家庭成员身上,尽量使其不对人体正常活动产生干扰,再通过蓝牙技术将采集的数据传输到接收设备并对其进行处理。
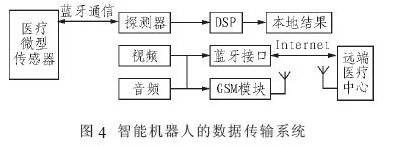
在智能机器人上安装1个带有蓝牙模块的探测器作为接收设备,各种医疗传感器将采集到的生理信息数据通过蓝牙模块传输到探测器,探测器有2种工作方式:一是将数据交给智能机器人处理,提供本地结果;二是与Internet连接(也可以通过GSM无线模块直接发回),通过网络将数据传输到远程医疗中心,达到医疗保健与远程监护的目的。视频和音频数据的传输也采用这种方式。智能机器人的数据传输系统如图4所示。
4蓝牙模块的应用
4.1 蓝牙技术概况
蓝牙技术是用于替代电缆或连线的短距离无线通信技术。它的载波选用全球公用的2.4GHz(实际射频通道为f=2402+k×1MHz,k=0,1,2,.,78)ISM频带,并采用跳频方式来扩展频带,跳频速率为1600跳/s,可得到79个1MHz带宽的信道。蓝牙设备采用GFSK调制技术,通信速率为1Mbit/s,实际有效速率最高可达721Kbit/s,通信距离为10m,发射功率为1mW;当发射功率为100mW时,通信距离可达100m,可以满足数字化家庭的需要。
4.2 蓝牙模块
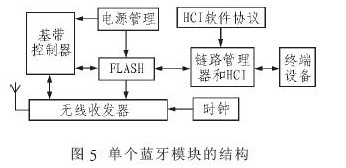
ROK101007型蓝牙模块是爱立信公司推出的适合于短距离通信的无线基带模块。它的集成度高、功耗小(射频功率为1mW),支持所有的蓝牙协议,可嵌入任何需要蓝牙功能的设备中。该模块包括基带控制器、无线收发器、闪存、电源管理模块和时钟5个功能模块,可提供高至HCI(主机控制接口)层的功能。单个蓝牙模块的结构如图5所示。
4.3 主/从设备硬件组成
蓝牙技术支持点到点PPP(Point-to-PointProtocol)和点对多点的通信,用无线方式将若干蓝牙设备连接成1个微微网。每个微微网由1个主设备(Master)和若干个从设备(Slave)组成,从设备最多为7台。主设备负责通信协议的动作,MAC地址用3位来表示,即在1个微微网内可寻址8个设备(互联的设备数量实际是没有限制的,只不过在同一时刻只能激活8个,其中1个为主,7个为从)。从设备受控于主设备。所有设备单元均采用同一跳频序列。
将带有蓝牙模块的微型医疗传感器作为从设备,将智能机器人上的带有蓝牙模块的探测器作为主设备。主从设备的硬件主要包括天线单元、功率放大模块、蓝牙模块、嵌入式微处理器系统、接口电路及一些辅助电路。主设备是整个蓝牙网络的核心部分,要完成各种不同通信协议之间的转换和信息共享,以及同外部通信网络之间的数据交换功能,同时还负责对各个从设备的管理和控制。
5结束语
随着社会的进步,经济的发展和人民生活水平的提高,越来越多的人需要家庭医疗保健服务。文中提出的应用于数字化家庭医疗保健服务的智能机器人系统的功能较为全面,且在家用智能机器人、基于蓝牙技术的智能家居和数字化医院等方面的拓展应用非常广阔,具有极大的市场潜力。
|