在一些情况下,全差分电压反馈型放大器的稳定性似乎受反馈电阻值很大影响―RF/RG比始终正确,这到底是因为什么呢?
信号需要增益时,放大器是首选组件。对于电压反馈型和全差分放大器,反馈和增益电阻之比RF/RG决定增益。一定比率设定后,下一步是选择RF或RG的值。RF的选择可能影响放大器的稳定性。
放大器的内部输入电容可在数据手册规格表中找到,其与RF交互以形成传递函数的中的一个极点。如果RF极大,此极点将影响稳定性。如果极点发生的频率远高于交越频率,则不会影响稳定性。不过,如果通过f = 1/(2πRFCin,amp)确定的极点位置出现在交越频率附近,相位裕量将减小,可能导致不稳定。
图1的示例显示小信号闭环增益与ADA4807-1电压反馈型放大器频率响应的实验室结果,采用同相增益为2的配置,反馈电阻为499 Ω、1 kΩ和10 kΩ。数据手册建议RF值为499 Ω。
小信号频率响应中的峰化程度表示不稳定性。RF从499 Ω增加至1 kΩ可稍微增加峰化。这意味着RF为1 kΩ的放大器具有充足的相位裕量,且较稳定。RF为10 kΩ时则不同。高等级的峰化意味着不稳定性(振荡),因此不建议。

图1. 使用不同反馈电阻的实验室结果。VS = ±5 V,VOUT = 40 mV p-p,RLOAD = 1 kΩ,RF值为499 Ω、1 kΩ和10 kΩ。
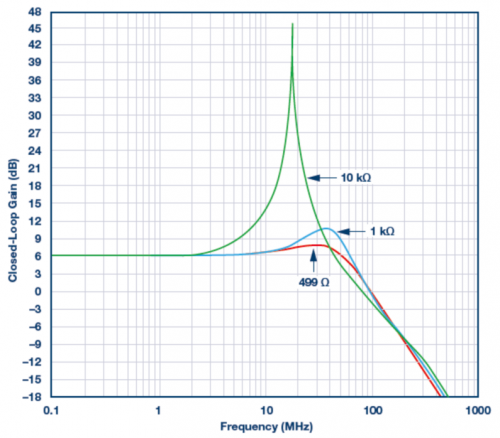
图2. 使用ADA4807 SPICE模型的模拟结果。VS = ±5 V,G = 2且RLOAD = 1 kΩ,RF值为499 Ω、1 kΩ和10 kΩ。
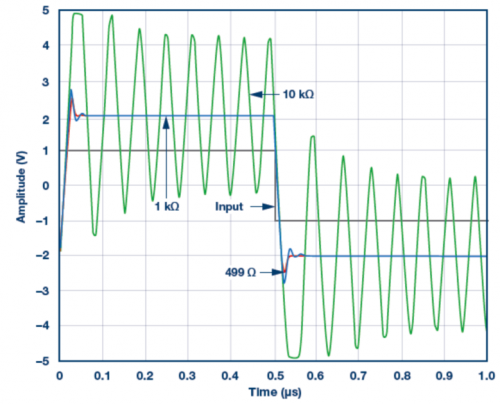
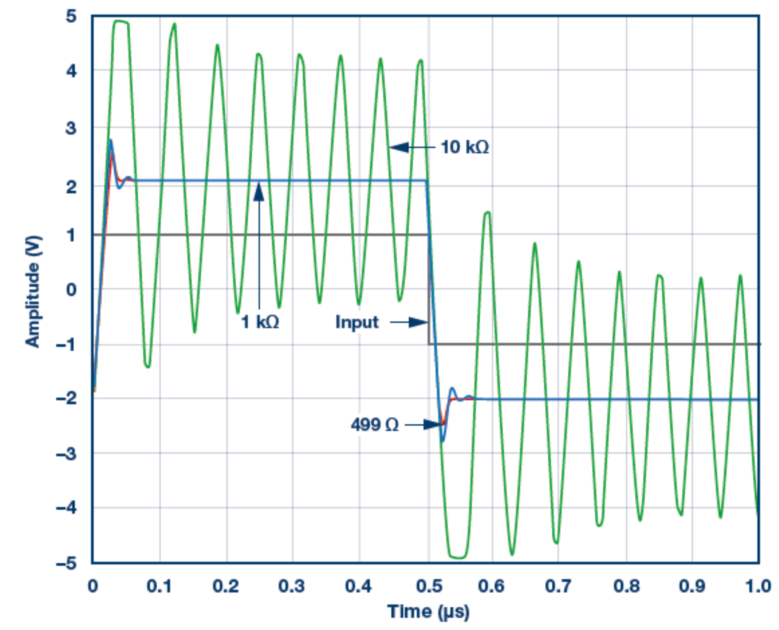
图3. 使用ADA4807 SPICE模型的脉冲响应模拟结果。VS = ±5 V,G = 2且RLOAD = 1 kΩ,RF值为499 Ω、1 kΩ和10 kΩ
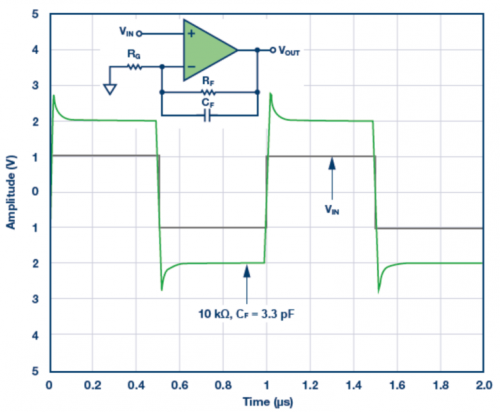
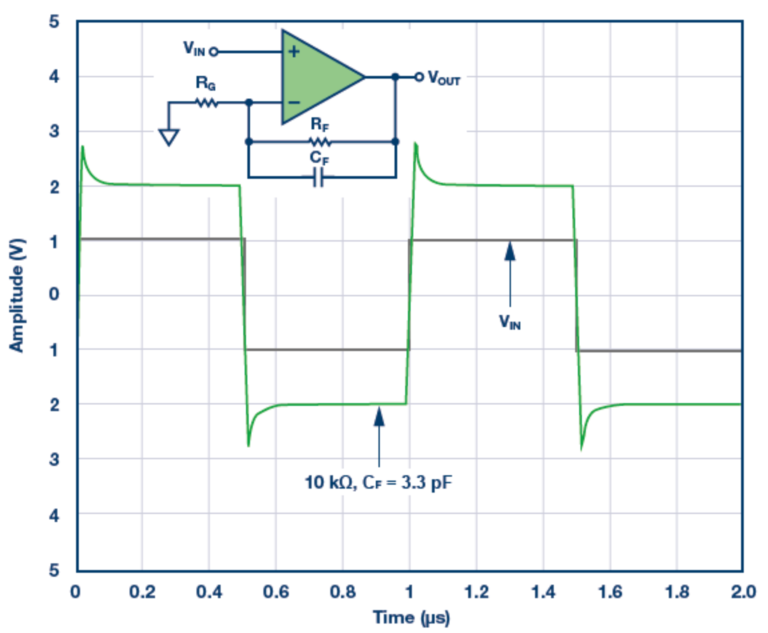
图4. 3.3 pF反馈电容CF的脉冲响应模拟结果。VS = ±5 V,G = 2,RF = 10 kΩ且RLOAD = 1 kΩ
在实验室中验证电路不是检验潜在不稳定性的强制步骤。图3显示使用SPICE模型的模拟结果,采用相同的RF值499 Ω、1 kΩ和10 kΩ。结果与图1一致。图3显示了时域内的不稳定性。通过在RF两端放置反馈电容给传递函数添加零点,可以去除图4所示的不稳定性。
RF的选择存在权衡,即功耗、带宽和稳定性。如果功耗很重要,且数据手册建议反馈值无法使用,或需要更高的RF值,可选择与RF并联放置反馈电容。此选择产生较低的带宽。
为电压反馈型和全差分放大器选择RF时,需要考虑系统要求。如果速度不重要,反馈电容有助于稳定较大的RF值。如果速度很重要,建议使用数据手册中推荐的RF值。
忽略RF与稳定性、带宽和功率的关系可能妨碍系统,甚至阻碍系统实现完整性能。
|