|
����
���ĵ���ϵͳ���Խ��Խ���ӣ���Դ��͵�Դ�������ڲ������ӡ�Ϊ��ʵ����ѵ�Դ��������ܶȡ��ɿ��Ժͳɱ���ϵͳ���ʦ������Ҫ�Լ���Ƶ�Դ��������������ǽ���ʹ������שʽ��Դ����ƺ��Ż������ܿ���ģʽ��Դ���ڳ�ΪԽ��ԽƵ����Խ��Խ����ս�Ե�����
��Դ��·������Ƴ�����������һ����ѵ����Ծ��鲻��ĵ�Դ���ʦ������ˡ���ʵ�ʲ�������У�Ϊ�˵������������ֵ��������Ҫ���������ε���������һ������ϵͳ���ԣ��ⲻ���ķѴ���ʱ�䣬����Ҳ����ȷ����Ϊ����ϵͳ�ĵ�Դ�������ȶ���ԣ�ȿ����ܵ��������ص�Ӱ�졣��Ӧ��ָ����Կ���ģʽ��Դ���价·������ƣ�˵����С�źŽ�ģ�Ļ�������ͷ����������Խ�ѹ��ת������Ϊ�������ӣ�������Щ����Ҳ���������������ˡ����Ļ��������û����õ� LTpowerCAD™ ��ƹ��ߣ��Լ�����Ƽ��Ż�������
ȷ������
һ��������ƵĿ���ģʽ��Դ (SMPS) ������û�������ģ����۴ӵ���������ѧ�Ƕ�������Ƿ����ϵͳ���ܵ������в��ȶ������ȶ���Դ�ĵ���֢״����������������մɵ����������������������ز������ж����������ѹ������ FET ���ȵȵȡ�
���������˻�·�ȶ��ԣ����кܶ�ԭ����ܵ��²�������Ҫ�������ҵ��ǣ����ھ��鲻��ĵ�Դ���ʦ���ԣ���Щ����ʾ�����Ͽ�������ȫ��ͬ����ʹ���ھ���ḻ�Ĺ���ʦ����ʱȷ�������ȶ��Ե�ԭ��Ҳ�Ǻ����ѡ�ͼ 1 ��ʾ��һ�����ȶ���ѹ�͵�Դ�ĵ�������Ϳ��ؽڵ㲨�Ρ����ڻ�·�������ܻ��ܽ����Դ���ȶ����⣬��Ϊ��ʱ������������������ģ����� PCB ������������ʦ�Ը��ֿ�����û����Ȼ���أ���ôȷ����������������DZ��ԭ����ܺķѴ���ʱ�䣬���˷dz���ɥ��
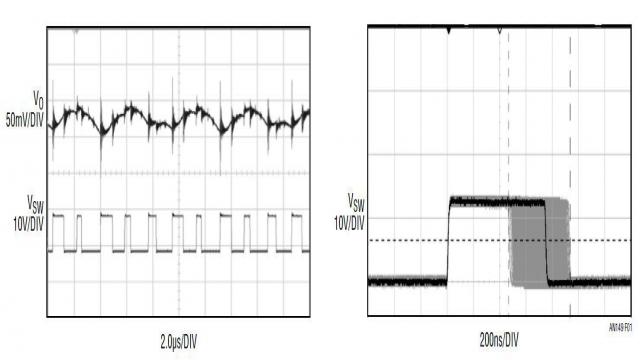
ͼ 1��һ�� �����ȶ��� ��ѹ��ת�����ĵ��������ѹ�Ϳ��ؽڵ㲨��
���ڿ���ģʽ��Դת�������ԣ�����ͼ 2 ��ʾ�� LTC3851 ��LTC3833 ����ģʽ��ѹ�͵�Դ��һ�ֿ���ȷ�����в��ȶ��Ƿ��ɻ�·��������ķ����ǣ��ڷ������Ŵ���������� (ITH) �� IC ��֮�����һ�� 0.1��F �Ĵ��͵�������(���ߣ��͵�ѹģʽ��Դ���ԣ�������������Է����ڷŴ���������źͷ�������֮�䡣) ��� 0.1��F �ĵ�����ͨ������Ϊ�㹻���Խ���·������չ����Ƶ����˿�ȷ����ѹ��·�ȶ��ԡ������������������Ժ�Դ����ȶ��ˣ���ô������п����û�·���������
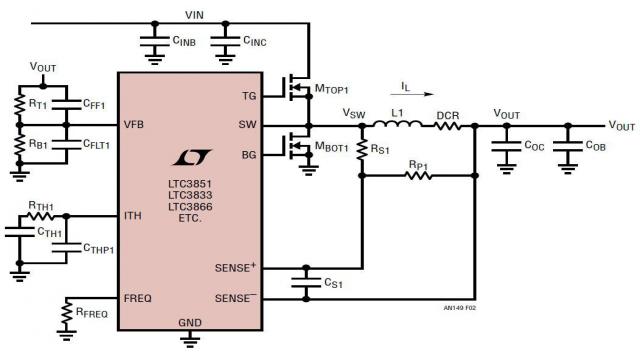
ͼ 2�����ͽ�ѹ��ת���� (LTC3851��LTC3833��LTC3866 ��)
������ϵͳͨ�����ȶ��ģ����Ǵ�����С��˲̬��Ӧ�����������������Ҫ������������������˲̬����Ҫ���������˵�Դ������ɱ��ͳߴ硣ͼ 3 ��ʾ�˽�ѹ��ת�����ڸ������� / ����˲̬ʱ�ĵ��������ѹ�͵�����������Ρ�ͼ 3a ���ȶ������� (BW) ��С�Ĺ�����ϵͳ�IJ��Σ��Ӳ������ܿ�������˲̬ʱ�кܴ�� VOUT �³� / ���塣ͼ 3b �Ǵ������Ƿ����ϵͳ�IJ��Σ����� VOUT ���³� / ����С�ö࣬���Dz�������̬ʱ���ȶ���ͼ 3c ��ʾ��һ��������õĵ�Դ֮����˲̬���Σ��õ�Դ�߱����ٺ��ȶ��Ļ�·��
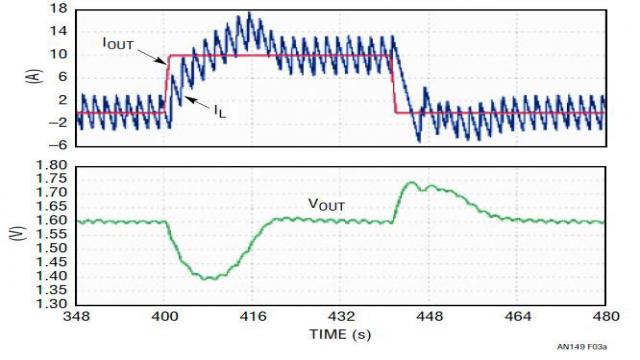
(a) ������С���ȶ�
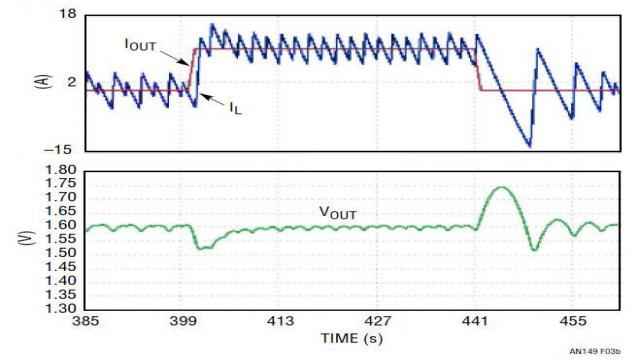
(b) �����ϴ��ȶ�
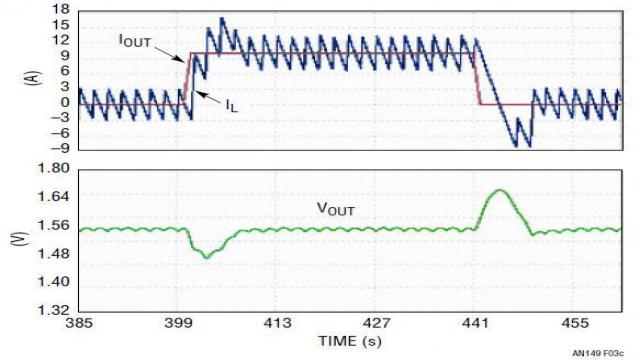
(c) �߿��ٺ��ȶ���·��������
ͼ 3��������˲̬��Ӧ �� (a) ������ϵͳ��(b) Ƿ����ϵͳ��(c) �߿��ٺ��ȶ���·��������
PWM ת�������ʼ���С�źŽ�ģ
����ģʽ��Դ (SMPS)������ͼ 4 �еĽ�ѹ��ת������ͨ�������ֹ���ģʽ����ȡ���ֹ���ģʽȡ���������ؿ��صĽ�ͨ / �Ͽ�״̬����ˣ��õ�Դ��һ����ʱ��仯�ķ�����ϵͳ��Ϊ���ó������Կ��Ʒ�����������Ʋ�����·�������� SMPS ��·��̬�����㸽����Ӧ����� SMPS ��·�����Ի�������������һ��ƽ��ʽ��С�ź�����ģ�͡�
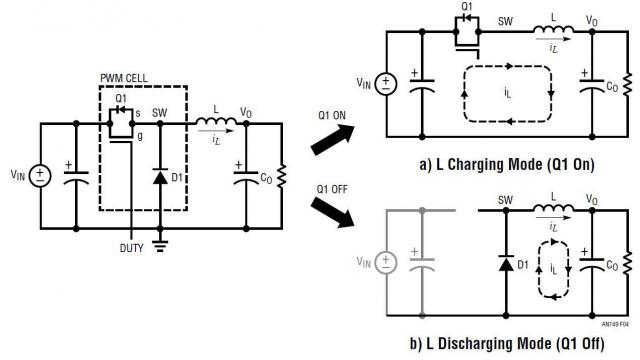
ͼ 4����ѹ�� DC/DC ת����������һ���������� TS �ڵ����ֹ���ģʽ
��ģ���� 1��ͨ���� TS ƽ������ɲ���ʱ��仯��ϵͳ
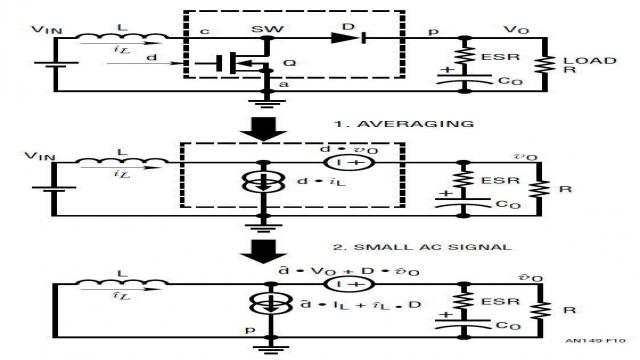
���� SMPS ��Դ���� (������ѹ�͡���ѹ�ͻ�ѹ/��ѹ��ת����) ����һ�����͵� 3 ���� PWM ���ص�Ԫ���õ�Ԫ������Դ���ƿ��� Q ����Դ���� (������) D��Ϊ�����Ч�ʣ������� D ������ͬ�� FET ���棬�����Ժ���Ȼ��һ����Դ���ء���Դ���� ��a�� ����Դ���ض��ӡ���Դ���� ��p�� ����Դ���ض��ӡ���ת�����У����� a �Ͷ��� p ʼ�����ӵ���ѹԴ�����罵ѹ��ת�����е� VIN �͵ء��������� ��c�� ����������Դ���ڽ�ѹ��ת�����о��ǵ������
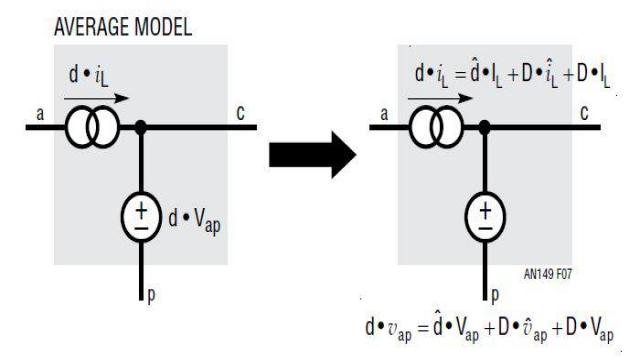
Ϊ�˽���ʱ��仯�� SMPS ��ɲ���ʱ��仯��ϵͳ������ͨ������Դ���� Q ���ƽ��ʽ����Դ���Լ�����Դ���� (������) D ���ƽ��ʽ��ѹԴ���ַ�ʽ��Ӧ�� 3 ���� PWM ��Ԫƽ��ʽ��ģ������ƽ��ʽ���� Q �ĵ������� d • iL����ƽ��ʽ���� D �ĵ�ѹ���� d • vap,����ͼ 5 ��ʾ��ƽ������һ���������� TS ֮�ڽ��еġ���Ȼ����Դ�͵�ѹԴ�������������ij˻�����ô��ϵͳ��Ȼ�Ƿ�����ϵͳ��
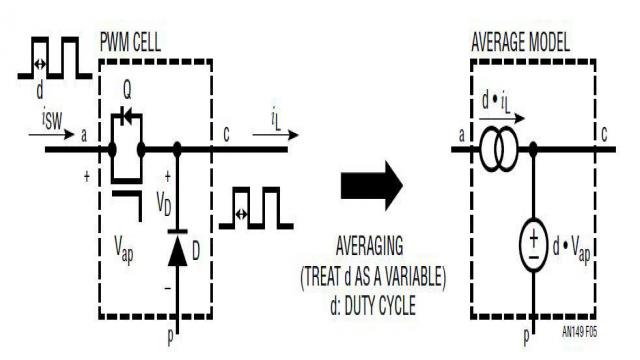
ͼ 5����ģ���� 1���� 3 ���� PWM ���ص�Ԫ���ƽ��ʽ����Դ�͵�ѹԴ
��ģ���� 2������AC С�źŽ�ģ
��һ����չ�������ij˻��Եõ����� AC С�ź�ģ�͡����磬����  ������ X �� DC ��̬�Ĺ����㣬�� ������ X �� DC ��̬�Ĺ����㣬��  �� AC С�ź�Χ�� X �ı仯����ˣ��������� x • y �Ļ�������дΪ�� �� AC С�ź�Χ�� X �ı仯����ˣ��������� x • y �Ļ�������дΪ��
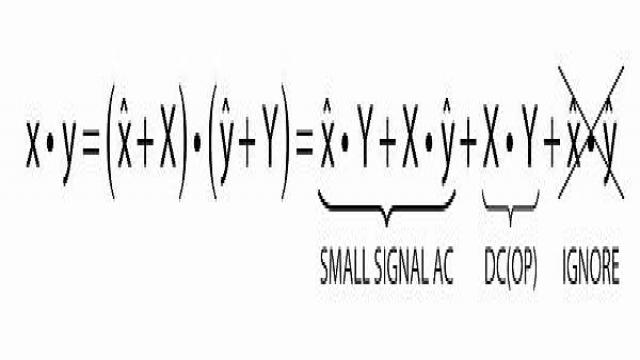
ͼ 6��Ϊ����С�ź� AC ���ֺ� DC ������չ�����������ij˻�
ͼ 6 ��ʾ������С�ź� AC ���ֿ����� DC ������ (OP) ���ַֿ������� AC С�źű���  �ij˻����Ժ��ԣ���Ϊ���Ǹ���С�ı�����������һ���ƽ��ʽ PWM ���ص�Ԫ�����ػ�Ϊ��ͼ 7 ��ʾ�ĵ�·�� �ij˻����Ժ��ԣ���Ϊ���Ǹ���С�ı�����������һ���ƽ��ʽ PWM ���ص�Ԫ�����ػ�Ϊ��ͼ 7 ��ʾ�ĵ�·��
ͼ 7����ģ���� 2��ͨ��չ�����������ij˻��� AC С�źŽ�ģ
ͨ��������������ģ����Ӧ�õ���ѹ��ת������ (��ͼ 8 ��ʾ)���ý�ѹ��ת�����Ĺ��ʼ��Ϳ��Խ�ģΪ�ĵ�ѹԴ  �����������һ�� L/C �����˲������硣 �����������һ�� L/C �����˲������硣
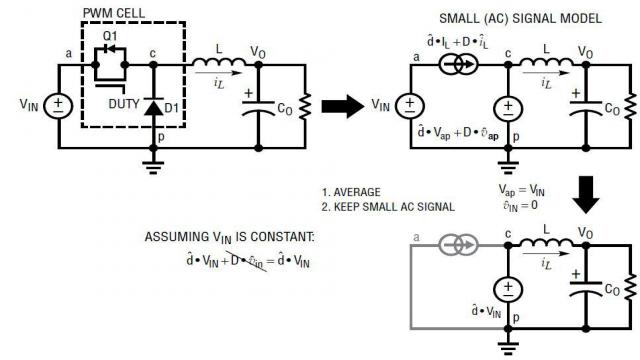
ͼ 8������ѹ��ת�������ƽ��ʽ��AC С�ź����Ե�·
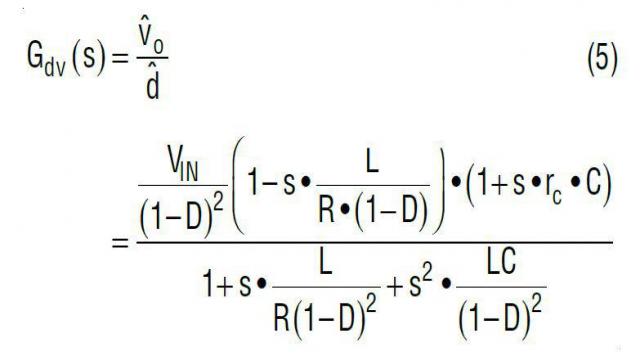
��ͼ 8 ��ʾ���Ե�·Ϊ��������Ȼ�����ź���ռ�ձ� d������ź��� vOUT����ô��Ƶ���ý�ѹ��ת�����Ϳ�����ռ�ձ��������ת�ƺ��� Gdv(s) ��������
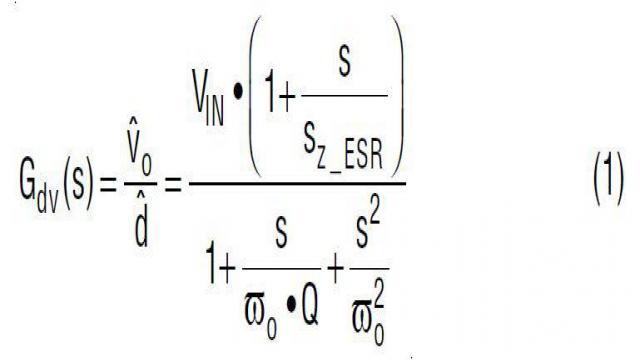
����
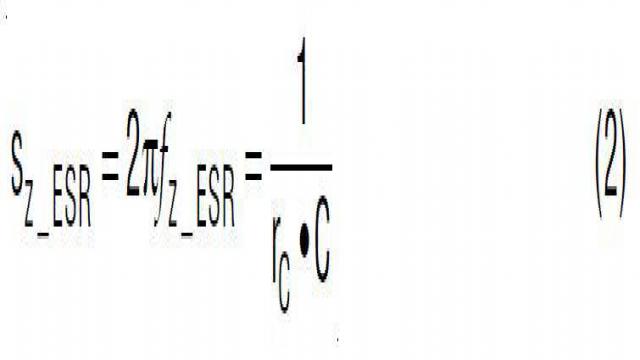
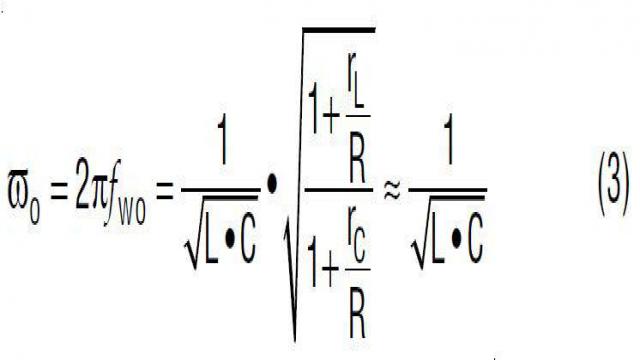
���� Gdv(s) ��ʾ���ý�ѹ��ת�����Ĺ��ʼ���һ������ϵͳ����Ƶ���������������һ����㡣��� sZ_ESR ����������� C ���� ESR rC ������г��˫����  ������˲�������� L �͵����� C ������ ������˲�������� L �͵����� C ������
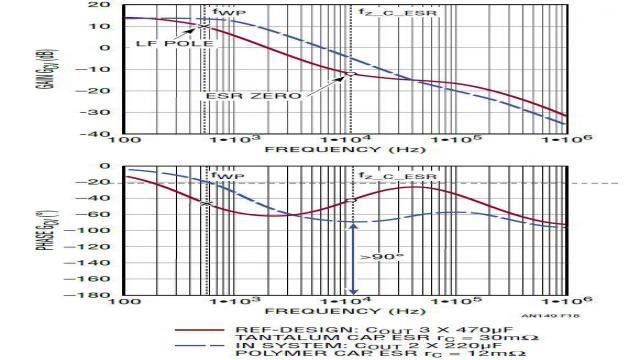
��Ȼ��������Ƶ����������������� ESR �ĺ�������ô���� Gdv(s) �IJ���ͼ����ѡ���Դ����������IJ�ͬ���仯����ͼ 9 ��ʾ�������������ѡ��Ըý�ѹ��ת�������ʼ���С�ź�����Ӱ��ܴ�����õ�Դʹ��С��������ݻ� ESR �dz��͵��������������ô ESR ���Ƶ�ʾͿ���ԶԶ����г��Ƶ�ʡ����ʼ���λ�ӳٿ��ܽӽ� �C180�㡣���������ѹ������·�պ�ʱ�����ܺ��Ѳ����û�·��
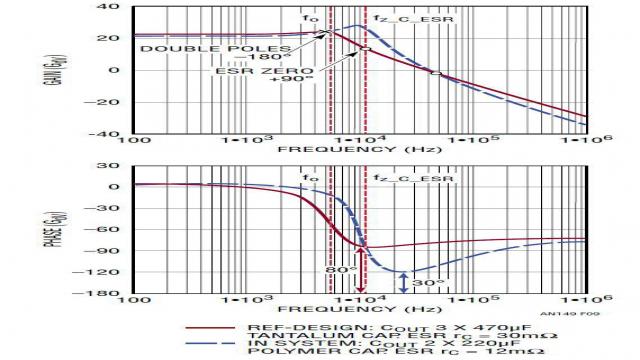
ͼ 9��COUT �������仯���¹��ʼ� Gdv(s) ��λ�����仯
��ѹ��ת������С�ź�ģ��
����ͬ���� 3 ���� PWM ���ص�Ԫƽ��ʽС�źŽ�ģ������Ҳ����Ϊ��ѹ��ת������ģ��ͼ 10 ��ʾ������Ϊ��ѹ��ת������ģ��������ת��Ϊ���� AC С�ź�ģ�͵�·��
ͼ 10����ѹ��ת������ AC С�źŽ�ģ��·
��ѹ��ת�������ʼ���ת�ƺ��� Gdv(s) �ɴӵ�ʽ 5 �еó�����Ҳ��һ������ϵͳ������ L/C г���뽵ѹ��ת������ͬ����ѹ��ת�������� COUT ESR ��㣬����һ���Ұ�ƽ����� (RHPZ) ���� RHPZ �����������ߣ�������λ��С (�为)����ʽ 6 Ҳ��ʾ����� RHPZ ��ռ�ձȺ��ص��費ͬ���仯����Ȼռ�ձ��� VIN �ĺ�������ô��ѹ��ת�������ʼ���ת�ƺ��� Gdv(s) ���� VIN ���ص������䡣�ڵ� VIN �ʹ��� IOUT_MAX ʱ��RHPZ λ�����Ƶ�ʴ�����������������λ�ͺ����ʹ��������ƴ����ܴ����ѹ��ת��������Ϊһ��һ������ԭ��Ϊ��ȷ����·�ȶ��ԣ����������ѹ��ת����ʱ������������������ RHPZ Ƶ�ʵ� 1/10�������������ˣ�������������ѹ / ��ѹ������ʽ (�����ͽ�ѹ / ��ѹ)��SEPIC �� CUK ת���������ж����ڲ���Ҫ�� RHPZ����������Ƴɴ����ܴ�˲̬��Ӧ�ܿ�Ľ��������
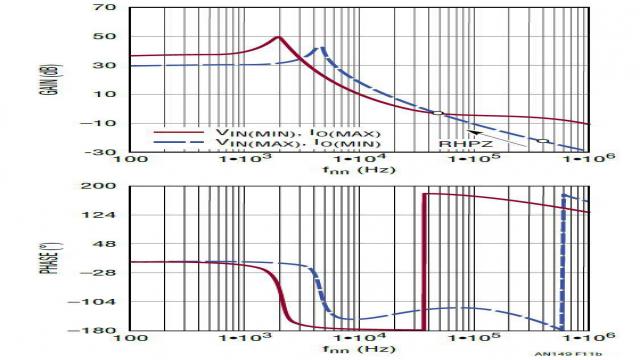
ͼ 11����ѹ��ת�������ʼ�С�ź�ռ�ձ��� VO ת�ƺ����� VIN ���ض��ı�
�õ�ѹģʽ���ƱպϷ�����·
�����ѹ�����ɱպϵķ�����·ϵͳ���ڡ����磬��ͼ 12 �У��������ѹ VOUT ����ʱ��������ѹ VFB ���������������Ŵ���������½������ռ�ձ� d �½��������VOUT �����ͣ���ʹ VFB = VREF���������Ŵ����IJ������������ I �͡�II �ͻ� III �ͷ����Ŵ������硣ֻ��һ�����ƻ�·���� VOUT�����ֿ��Ʒ�����Ϊ��ѹģʽ���ơ��������ع�˾�� LTC3861 �� LTC3882 ���ǵ��͵ĵ�ѹģʽ��ѹ�Ϳ�������
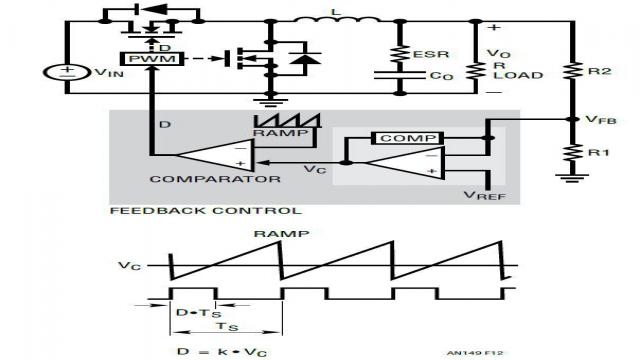
ͼ 12���߱պϵ�ѹ������·�ĵ�ѹģʽ��ѹ��ת��������ͼ
Ϊ���Ż���ѹģʽ PWM ת��������ͼ 13 ��ʾ��ͨ����Ҫһ�ָ��ӵ� III �Ͳ������磬��ƾ��������λԣ�����һ�����ٻ�·�����ʽ 7 ��ͼ 14 ��ʾ�����ֲ���������Ƶ������ 3 �������������㣺��Ƶ���ּ��� (1/s) �ṩ�ߵ� DC ���棬������ȼ�С DC ������������������ϵͳг��Ƶ�� f0 �������Բ����ɹ��ʼ��� L �� C ����� �C180�� ��λ�ӳ٣��� fESR �����õ�һ����Ƶ���㣬������ COUT ESR ��㣬�ڶ�����Ƶ�����������Ҫ�Ĵ��� fC ���⣬��˥��������·�еĿ���������III �Ͳ����൱���ӣ���Ϊ���ֲ�����Ҫ 6 �� R/C ֵ���ҵ���Щֵ���������Ǹ��dz���ʱ������
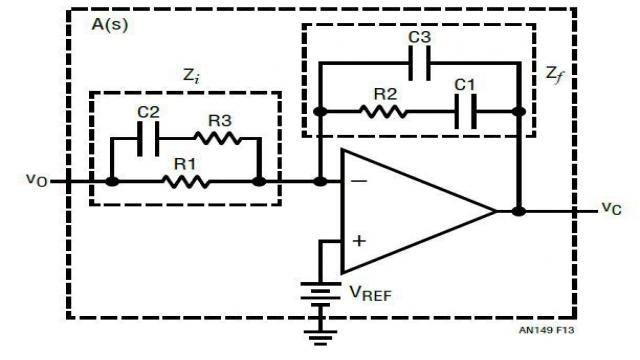
ͼ 13�����ڵ�ѹģʽת������ III �ͷ�����������
����
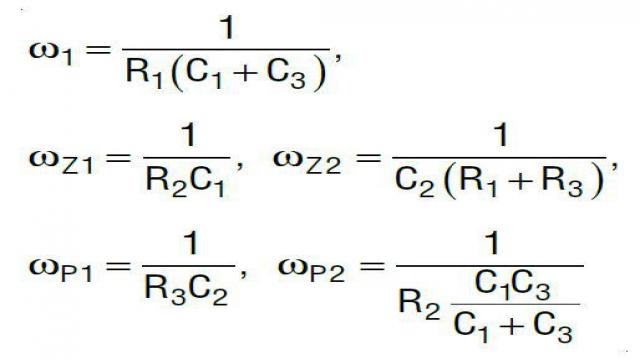

ͼ 14��III �Ͳ��� A(s) �ṩ 3 �������������㣬��ʵ����ѵ����廷·���� TV(s)
Ϊ�˼��Զ�������ģʽ��Դ��ƣ��������ؿ����� LTpowerCAD ��ƹ��ߡ����ʹ��·������������ü��ˡ�LTpowerCAD ��һ����� www.linear.com.cn/LTpowerCAD ������ص���ƹ��ߡ������������û�ѡ���Դ�����������ƹ��ʼ�����Լ��Ż���ԴЧ�ʺͻ�·��������ͼ 15 ������ʾ���������������ص�ѹģʽ���������� (���� LTC3861)���价·�������ø���ƹ��߽�ģ������һ�������Ĺ��ʼ����û�����ȷ����������λ�� (Ƶ��)��Ȼ���ո�������ָ����������ʵ�� R/C ֵ��ʵʱ������廷·�������˲̬���ܡ�֮����Ʒ��������������һ�� LTspice® �����·�ϣ�����ʵʱ���档
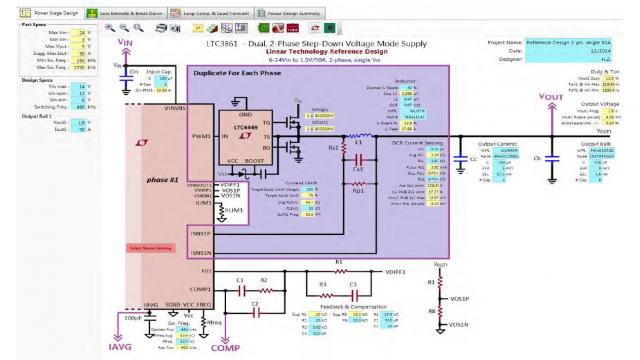
(a) LTpowerCAD ���ʼ����ҳ��
(b) LTpowerCAD ��·��������˲̬���ҳ��
ͼ 15��LTpowerCAD ��ƹ������˵�ѹģʽת���� III �ͻ�·��Ƶĸ���
(�� www.linear.com.cn/LTpowerCAD �������)
Ϊ����ģʽ�������ӵ�����·
��һ��·��ѹģʽ�����ܵ�һЩ���ơ�����ģʽ��Ҫ�൱���ӵ� III �Ͳ������硣��·���ܿ�������������������������Ա仯�����ִ���Ļ��������ǵ����� ESR �� PCB �����迹��һ���ɿ��ĵ�Դ����Ҫ���ٹ��������������Ҫһ�ֿ��ٵ�����ⷽ���Ϳ��ٱ����Ƚ�����������Ҫ�ܶ���λ�����Ĵ��������������ԣ�����Ҫһ������ĵ����������� / ��·��
����ѹģʽת��������һ���ڲ��������ͨ·�ͷ�����·��ʹ����һ������ģʽ���Ƶ�ת������ͼ 16 �� 17 ��ʾ�˵��ͷ�ֵ����ģʽ��ѹ��ת�������乤����ʽ���ڲ�ʱ�ӽ�ͨ���˵Ŀ��� FET��֮��ֻҪ�����ķ�ֵ����������źŴﵽ�Ŵ��� ITH ���ŵ�ѹ VC�����˵� FET �ͶϿ����Ӹ�����������������·ʹ�������Ϊһ���ܿص���Դ����ˣ��߱պϵ�����·�Ĺ��ʼ������ 1 ��ϵͳ�������Ǿ� L/C г��� 2 ��ϵͳ����������ʼ������������λ�ͺ�� 180�� ����ΪԼ 90�㡣��λ�ӳټ���ʹ�����ⲿ��ѹ��·��������ˡ���λ�ӳټ��ٻ������˵�Դ��������������б仯�����жȣ���ͼ 18 ��ʾ��
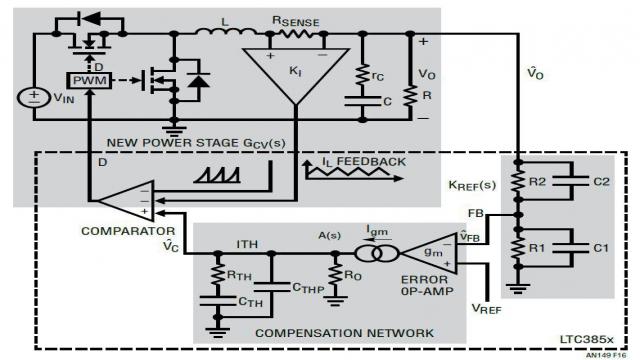
ͼ 16�����ڲ�������·���ⲿ��ѹ������·�ĵ���ģʽת��������ͼ
ͼ 17����ֵ����ģʽ�����źŲ���
ͼ 18���߱պϵ�����·���¹��ʼ�ת�ƺ��� GCV(s)
����������źſ���ֱ����һ�����ӵ� RSENSE ��⣬����ӵ�ͨ����������� DCR �� FET RDS(ON) ��⡣����ģʽ���ƻ��ṩ����������Ҫ�ĺô�����ͼ 17 ��ʾ����Ȼ����������������ڷ�ʽ��ͨ���Ŵ��������ѹ�������ƣ���ôϵͳ�ڹ��ػ�������������ʱ�����ܹ���ȷ�����ٵ����Ƶ������ڼӵ�������ѹ˲̬ʱ���������ӿ����Ҳ�ܵ����ϸ���ơ������ת���� / ��λ����ʱ��ͨ�����Ŵ��� ITH ��������һ��ƾ�����ģʽ���ƣ������ڶ����Դ֮��dz����ؾ��ֵ������Ӷ�ʵ����һ���ɿ��Ķ��� (PolyPhase®) ��ơ����͵���ģʽ�����������������ع�˾�� LTC3851A��LTC3833 �� LTC3855 �ȡ�
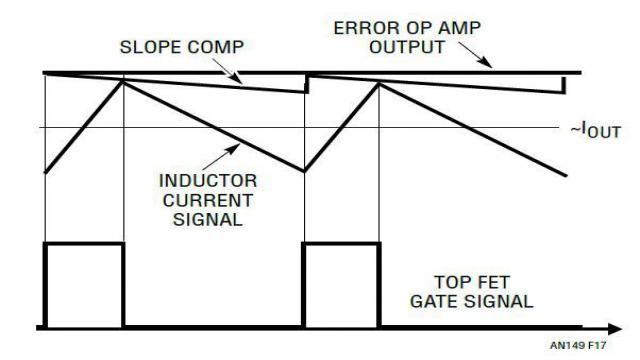
��ֵ���ֵ����ģʽ���Ʒ���
ͼ 16 �� 17 ��ʾ�ĵ���ģʽ���Ʒ����Ƿ�ֵ���������ģʽ���ơ�ת�����Թ̶�����Ƶ�� fSW �������Ӷ��dz�����ʵ��ʱ��ͬ������λ�����������Ƕ��ڲ���ת������Ȼ��������ڿ��� FET դ���ضϺ����žͷ���������ѹ˲̬����ôת�����ͱ���ȴ�һ��ʱ�䣬���ʱ����� FET �Ͽ�ʱ�� TOFF��ֱ����һ��ʱ��������Ӧ��˲̬Ϊֹ����� TOFF �ӳ�ͨ���������⣬���Ƕ���һ�������Ŀ���˲̬ϵͳ����ȴ����Ҫ�����⣬���� FET ����̽�ͨʱ�� (TON_min) �����ܷdz��̣���Ϊ�����Ƚ�����Ҫ��������ʱ���Ա�����������ڸ� VIN/VOUT ��ѹ��Ӧ�ö��ԣ�����������߿���Ƶ�� fSW�����⣬��ֵ����ģʽ���ƻ���Ҫһ����б�ʲ���������ռ�ձȳ��� 50% ʱ���ֵ�����·�ȶ��������������ع�˾�Ŀ��������ԣ��ⲻ�Ǹ����⡣�������صĿ�����ͨ������������Ӧб�ʲ�������������ռ�ձȷ�Χ��ȷ��������·�ȶ��ԡ�LTC3851A �� LTC3855 �ǵ��͵ķ�ֵ����ģʽ��������
��ֵ����ģʽ�����������ܿ� FET ��ͨʱ�䣬��һֱ�ȴ�ֱ���������ֵ�����ﵽ���ֵ���� (VITH) �Բ��ٴν�ͨ���� FET����ˣ���Դ�����ڿ��� FET �� TOFF ʱ����Ӧ��������˲̬�����⣬��Ȼ��ͨʱ���ǹ̶��ģ���ô���� FET �� TON_min ���Աȷ�ֵ����ģʽ����ʱ�̣����������ߵ� fSW��ʵ�ָ߽�ѹ��Ӧ�á���ֵ����ģʽ���Ʋ���Ҫ�����б�ʲ�������ʵ�ֵ�����·�ȶ��ԡ�Ȼ����ʹ�ù�ֵ����ģʽ����ʱ����Ϊ������������ TS �仯��������ʾ�����ϣ����ؽڵ㲨�ο��ܳ��ָ���Ķ�����LTC3833 �� LTC3838 �ǵ��͵Ĺ�ֵ����ģʽ��������
Ϊ�߱��պϵ�����·���¹��ʼ���ģ
ͼ 19 ��ʾ��ͨ�������������Ϊ�ܷŴ��� ITH ���ŵ�ѹ  ���Ƶĵ���Դ��������һ�������ڲ�������·�Ľ�ѹ��ת�������ʼ���һ��ģ�͡����Ʒ���Ҳ�����������ߵ��������ģʽ���Ƶ����ˡ������ģ���ж��? ͼ 20 ��ʾ�˸�һ��ģ�ͺ�һ�������ӵ�ȷ��ģ��֮��ת�ƺ��� GCV(s) = vOUT/vC �ıȽϽ��������һ���� 500kHz ����Ƶ�����еĵ���ģʽ��ѹ��ת����������������У�һ��ģ��ֱ�� 10kHz ����ȷ�ģ�ԼΪ����Ƶ�� fSW �� 1/50��֮��һ��ģ�͵���λ���߾Ͳ���ȷ�ˡ���������ģ�ͽ����ڴ�����С����Ʋź��á� ���Ƶĵ���Դ��������һ�������ڲ�������·�Ľ�ѹ��ת�������ʼ���һ��ģ�͡����Ʒ���Ҳ�����������ߵ��������ģʽ���Ƶ����ˡ������ģ���ж��? ͼ 20 ��ʾ�˸�һ��ģ�ͺ�һ�������ӵ�ȷ��ģ��֮��ת�ƺ��� GCV(s) = vOUT/vC �ıȽϽ��������һ���� 500kHz ����Ƶ�����еĵ���ģʽ��ѹ��ת����������������У�һ��ģ��ֱ�� 10kHz ����ȷ�ģ�ԼΪ����Ƶ�� fSW �� 1/50��֮��һ��ģ�͵���λ���߾Ͳ���ȷ�ˡ���������ģ�ͽ����ڴ�����С����Ʋź��á�
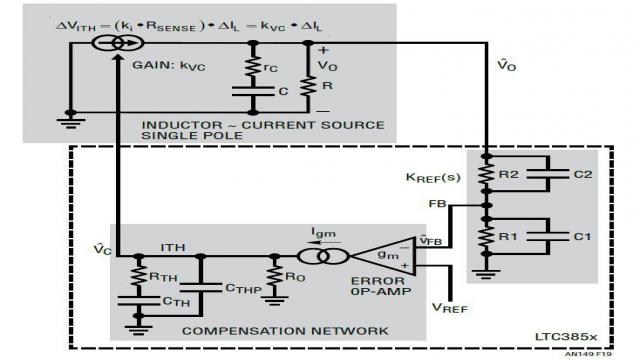
ͼ 19������ģʽ��ѹ��ת�����ļ�һ��ģ��
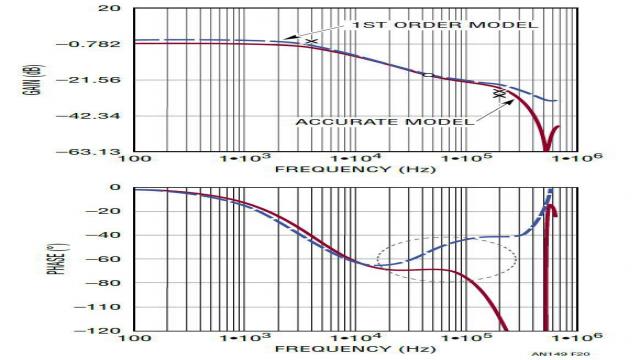
ͼ 20������ģʽ��ѹ��ת������һ��ģ�ͺ�ȷģ��֮��� GCV(s) �Ƚ�
ʵ���ϣ���Ե���ģʽת������������Ƶ�ʷ�Χ�ڿ���һ��ȷ��С�ź�ģ���൱���ӡ�R. Ridley�ĵ���ģʽģ�� [3] �ڵ�Դ��ҵ�������е�һ��ģ�ͣ����ڷ�ֵ����ģʽ��ֵ����ģʽ���ơ������Jian Li Ϊ����ģʽ���ƿ�����һ�ָ���ֱ�۵ĵ�·ģ�� [4]����ģ��Ҳ��������������ģʽ���Ʒ�����Ϊ�˼�����ã�LTpowerCAD ��ƹ���ʵ������Щȷģ�ͣ���ˣ���ʹһλ���鲻����û����� Ridley �� Jian Li ��ģ��û��̫���˽⣬Ҳ���Էdz��������һ������ģʽ��Դ��
����ģʽת�����Ļ�·�������
��ͼ 16 ��ͼ 21 �У��߱պϵ�����·�Ĺ��ʼ� Gcv(s) �ɹ��ʼ������ѡ���������Ҫ�ɵ�Դ�� DC ��� / ���ܾ������ⲿ��ѹ��·���� T(s) = GCV(s) • A(s) • KREF(s) ����ɵ�ѹ������ KREF(s) �Ͳ����� A(s) ������������������ƽ�����ؾ�����Դ���ȶ��Ժ�˲̬��Ӧ��
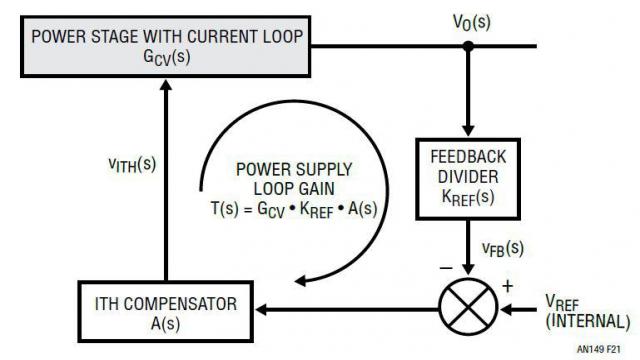
ͼ 21��������·��ƵĿ��Ʒ���ͼ
��֮���պϵ�ѹ��· T(s) ��������������Ҫ������������·�����ͻ�·�ȶ���ԣ�ȡ���·�����ɽ���Ƶ�� fC ����������һƵ���ϣ���·���� T(s) ����1 (0dB)����·�ȶ���ԣ��һ������λԣ�Ȼ�����ԣ����������·��λԣ��  �Ķ������ڽ���Ƶ�ʵ������� T(s) ��λ�ӳٺ� �C180�� ֮�ͨ����Ҫ 45�� �� 60�� ��С��λԣ����ȷ���ȶ��ԡ����ڵ���ģʽ���ƶ��ԣ�Ϊ��˥��������·�еĿ�����������·����ԣ�ȶ���Ϊ�� ½ • fSW ����˥����һ����ԣ�ϣ���� ½ • fSW ������С 8dB ˥�� (-8dB ��·����)�� �Ķ������ڽ���Ƶ�ʵ������� T(s) ��λ�ӳٺ� �C180�� ֮�ͨ����Ҫ 45�� �� 60�� ��С��λԣ����ȷ���ȶ��ԡ����ڵ���ģʽ���ƶ��ԣ�Ϊ��˥��������·�еĿ�����������·����ԣ�ȶ���Ϊ�� ½ • fSW ����˥����һ����ԣ�ϣ���� ½ • fSW ������С 8dB ˥�� (-8dB ��·����)��
ѡ����Ҫ�ĵ�ѹ��·����Ƶ�� fC
����Ĵ���������ʵ�ָ����˲̬��Ӧ���������������ͨ���ή���ȶ���ԣ�ȣ�ʹ���ƻ�·�Կ��������������С�һ��������ͨ���ڴ��� (˲̬��Ӧ) ���ȶ���ԣ��֮��ʵ�������õ�ƽ�⡣ʵ���ϣ�����ģʽ���ƻ�ͨ���� 1/2 • fSW �������źŵIJ���ЧӦ [3]����������һ��˫����  ����Щ˫������ ½ • fSW ���������˲���Ҫ����λ�ӳ١�һ����ԣ�Ҫ��ó������λԣ�Ȳ����˥�� PCB ����������Ƶ�ʾ�ҪѡΪ������λ����Ƶ�� fSW �� 1/10 �� 1/6�� ����Щ˫������ ½ • fSW ���������˲���Ҫ����λ�ӳ١�һ����ԣ�Ҫ��ó������λԣ�Ȳ����˥�� PCB ����������Ƶ�ʾ�ҪѡΪ������λ����Ƶ�� fSW �� 1/10 �� 1/6��

�� R1��R2��C1 �� C2 ��Ʒ�����ѹ������ Kref(s)
��ͼ 16 �У�DC ���� KREF �� Kref(s) ���ڲ�����ѹ VREF ����Ҫ�� DC �����ѹ Vo ֮�ȡ������� R1 �� R2 �����趨��Ҫ����� DC ��ѹ��
����
�������ӿ�ѡ������ C2���ԸĽ�������·�Ķ�̬��Ӧ���Ӹ�������˵���ڸ�Ƶʱ��C2 Ϊ��� AC ��ѹ�ź��ṩ���迹ǰ��ͨ·����ˣ�������˲̬��Ӧ������ C2 ���п��ܸ����ƻ�·��������Ҫ�Ŀ�����������ˣ���������һ����ѡ C1 �˲�������������˥���������������ʽ 11 ��ʾ������ C1 �� C2 �������������ѹ��ת�ƺ��� KREF(s) ��һ������һ�����㡣ͼ 22 ��ʾ�� KREF(s) �IJ���ͼ��ͨ����Ƴ� fz_ref < fp_ref��C1 �� C2 �� R1 �� R2 һ�𣬵������� fCENTER Ϊ���ĵ�Ƶ������λ������λ�������ڵ�ʽ 14 �и�������� fCENTER ������Ŀ�꽻��Ƶ�� fC ������ô Kref(s) ʹ��λ��ǰ�ڵ�ѹ��·���������λԣ�ȡ���һ���棬ͼ 22 ����ʾ��C1 �� C2 ����˸�Ƶʱ�ķ�ѹ�����档��������Dz���Ҫ�ģ���Ϊ��Ƶ�������ʹ���ƻ�·�Կ��������������С�C1 �� C2 ���µĸ�Ƶ��������ڵ�ʽ 15 �и�����
����
��
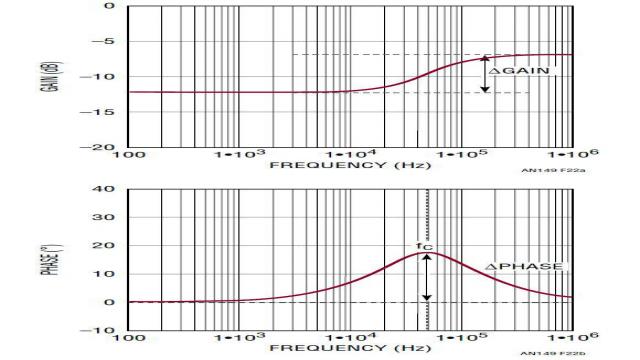
ͼ 22����������ѹ������ KREF(s) ��ת�ƺ�������ͼ
������ C1 �� C2 ���ԣ���ѹ�����絼�µ���λ������ ��REF �����õ�ʽ 16 ���㡣���⣬�� C2 >> C1 ������£����������ѹ���ԣ������λ�������ɵ�ʽ 17 �������Ӹõ�ʽ��Ҳ���Կ����������λ������ ��REF_max �ɷֱ� KREF = VREF/VO ��������Ȼ VREF ���������������ǹ̶��ģ���ô�ø��ߵ������ѹ VO ���Եõ��������λ��������
ѡ���REF��C1 �� C2 ʱ����Ҫ����Ҫ����λ�������벻��Ҫ�ĸ�Ƶ���������֮������Ȩ�⡣֮����Ҫ������廷·������ʵ�����ֵ��
��Ƶ�ѹ��· ITH ���Ŵ����� II �Ͳ�������
ITH ���� A(s) �ǻ�·�����������ؼ���һ������Ϊ��һ������ DC ���桢����Ƶ�� (����) �͵�Դ��ѹ��·����λ / ����ԣ�ȡ���һ������Դ�����gm �絼�ͷŴ������ԣ���ת�ƺ��� A(s) �ɵ�ʽ 18 ������
���У�gm �ǿ絼���Ŵ��������档Zith(s) �ǷŴ������ ITH �����ϲ���������迹��
��ͼ 21 ��ʾ�Ŀ��Ʒ���ͼ�п��Կ�������ѹ��·�������������µ�ʽ������
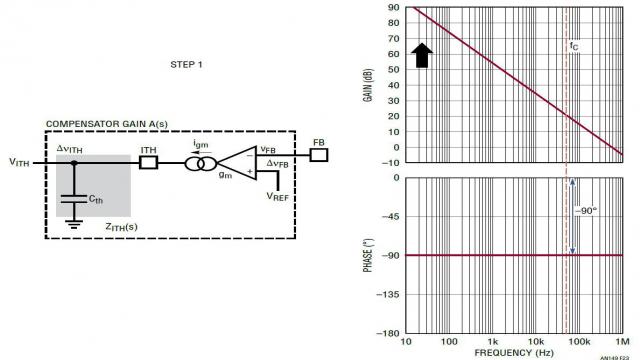
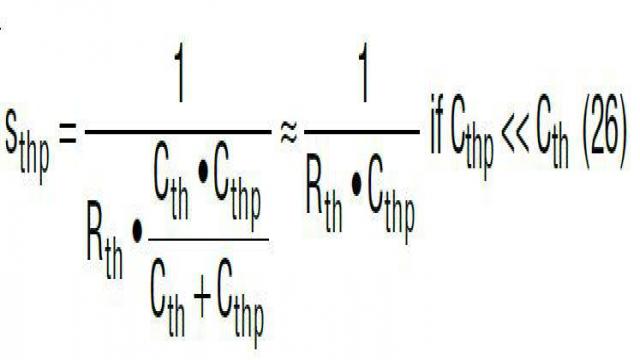
��ˣ�Ϊ������Ƚ��� DC ��������� DC ���� A(s) �Ƿdz���Ҫ�ġ�Ϊ���������� DC ���� A(s)������Ҫ�������� Cth ���ڷŴ������ ITH ���Ŵ����γ�һ��������������������£�A(s) ��������Ϊ��
ͼ 23 ��ʾ�� A(s) ��ԭ��ͼ���䲨��ͼ����ͼ��ʾ�������� Cth �����ߵ� DC������ A(s) �в�����һ����������ҵ��ǣ����˳�ʼ�� �C180�� ��������Cth �������� �C90�� ����λ�ͺ�һ��ϵͳ���ʼ� GCV(s) �� �C90�� ��λ���������Ժ��ڽ���Ƶ�� fC ���������ѹ��·��λ�ӽ� �C360�㣬�û�·�ӽ����ȶ�״̬��
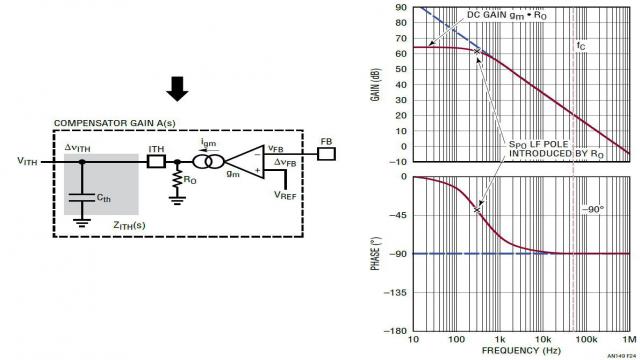
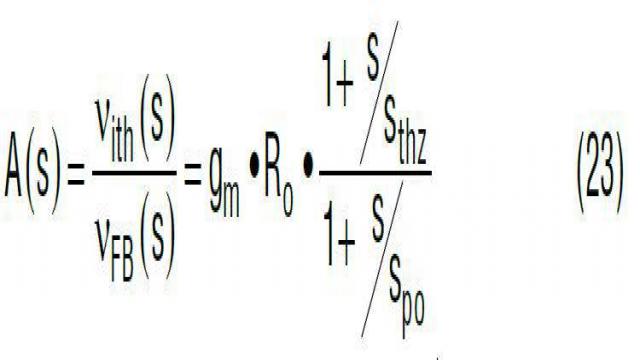
ʵ���ϣ�����Դ gm �Ŵ���������迹����һ�������ֵ����ͼ 24 �У�Ro �� gm �Ŵ��� ITH ���ŵ��ڲ�����迹���������ع�˾�������� Ro ͨ���ϸߣ��� 500k�� �� 1M�� ��Χ����ˣ������������� A(s) ת�ƺ�������˵�ʽ 21����ת�ƺ�����һ����Ƶ���� fpo (�� RO �� Cth ����)����� A(s) �� DC ����ʵ������ gm �� RO����ͼ 24 ��ʾ����Ԥ�ڵĽ���Ƶ�� fc_exp ����A(s) ��Ȼ�� �C90�� ����λ�ͺ�
����
ͼ 23������ 1���ĵ������������� A(s) ���䲨��ͼ
ͼ 24������ gm �Ŵ�������迹 RO �ĵ����� A(s)
Ϊ����� fC ������λ������һ���� Cth �����ĵ����� Rth �Բ���һ����㣬���ʽ 23 ��ͼ 25 ��ʾ������㹱���� +90�� ��ǰ��λ����ͼ 25 ��ʾ�������� sthz �����ڽ���Ƶ�� fC ֮ǰ����ô A(s) �� fC ������λ�������ŵ�������ˣ�����������˵�ѹ��·����λԣ�ȡ�
����
���ҵ��ǣ����������� sthz Ҳ�к��������� A(s) �� fC ����ĸ�Ƶ��Χ�����ŵ���ߡ���ˣ������ڿ���Ƶ�ʴ� A(s) ˥�����٣����Կ����������п��ܽ�����ƻ�·��Ϊ�˲�����һ������߲�˥�� PCB �������� ITH ������ IC �źŵ�֮���б�Ҫ������һ��С���մɵ����� Cthp����ͼ 26 ��ʾ��һ������£�ѡ�� Cthp << Cth���� PCB �����У��˲��������� Cthp Ӧ�÷����ھ����ܿ��� ITH ���ŵĵط���ͨ������ Cthp�����ղ���ת�ƺ��� A(s) �ɵ�ʽ 25 �� 26 �������䲨��ͼ��ͼ 26 ��ʾ��Cthp ����һ����Ƶ���� sthp���ü���Ӧ��λ�ڽ���Ƶ�� fC �Ϳ���Ƶ�� fS ֮�䡣Cthp ������ fS ���� A(s) ���棬����Ҳ�п��ܼ�С fC ����λ��sthp ��λ������λԣ�Ⱥ͵�Դ PCB ����������֮��Ȩ��Ľ����
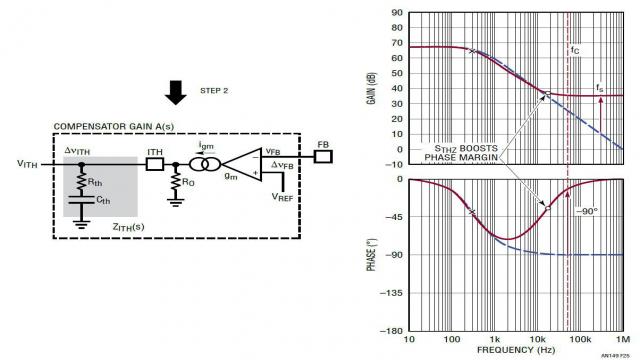
ͼ 25������ 2������ RTH �����������λ ���� �����㡢����㲹�� A(s)
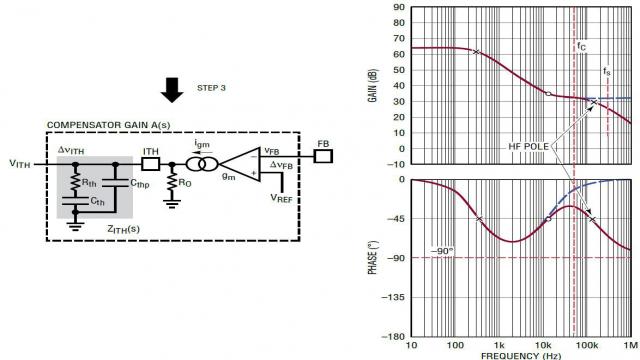
ͼ 26������ 3�����Ӹ�Ƶȥ�� Cthp ���� ˫���㡢����㲹�� A(s)
����
��Ȼ����ģʽ���ʼ���һ��������ϵͳ����ôͼ 26 ��ʾ��˫����͵���㲹������һ���㹻�ṩ�������λԣ���ˡ�
�Ŵ��� ITH ���������˫���㡢����㲹������Ҳ��Ϊ II �Ͳ������硣��֮�������������� CTH �� CTHP ��һ�������� RTH����� R/C ������Ŵ���������� Ro һ�𣬲�����һ����ͼ 27 ��ʾ�ĵ���ת�ƺ�����һ�����λ�� fz1 ������������λ�� fpo �� fp2 ����
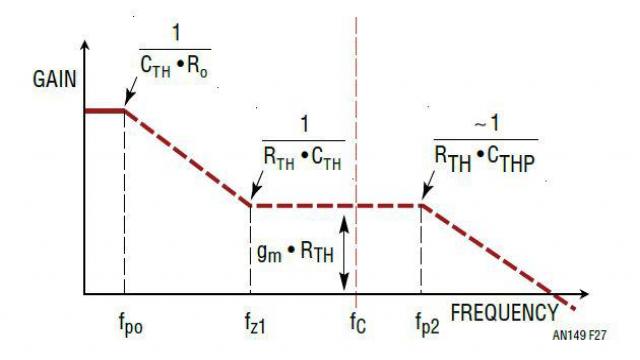
ͼ 27��II �Ͳ�������ת�ƺ����ĸ���ͼ
���� R/C ֵ�븺�ؽ�Ծ˲̬��Ӧ
ǰһ�ڽ����� II �Ͳ���������Ƶ����ı��֡���һ���պϻ�·��Դ����У�һ����Ҫ�����ܲ����Ǹ������� (�����½�) ˲̬ʱ��Դ�������ѹ�³� (�����)���������ͨ��ֱ���ܻ�·������Ƶ�Ӱ�졣
1��CTH �Ը��ؽ�Ծ˲̬��Ӱ�졣CTH Ӱ���Ƶ���� fpo ����� fz1 ��λ�á���ͼ 28 ��ʾ��CTH ԽС��ת�ƺ��� A(s) �ĵ�����Ƶ������Խ�ߡ���������п������̸���˲̬��Ӧ�ﵽ�ȶ���ʱ�䣬���� VOUT �³� (�����) ����û�кܴ�Ӱ�졣��һ���棬CTH ԽС����ζ�� fz1 Ƶ��Խ�ߡ����п�����Ŀ�꽻��Ƶ�� fC ���� fz1 ���߶��������ӵ���λ��
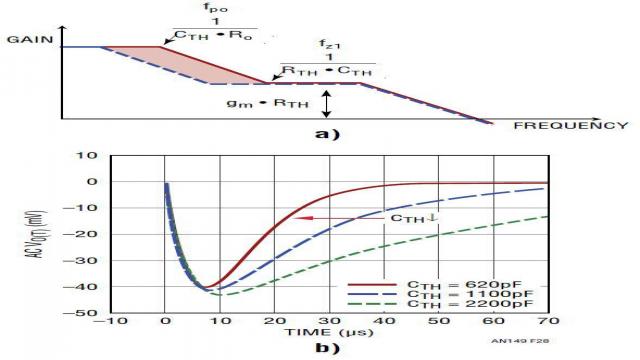
ͼ 28��CTH ��ת�ƺ�������˲̬��Ӱ��
2��RTH �Ը��ؽ�Ծ˲̬��Ӱ�졣ͼ 29 ��ʾ��RTH Ӱ����� fz1 �ͼ��� fp2 ��λ�á�����Ҫ���ǣ�RTH Խ��fz1 �� fp2 ֮��� A(s) �����Խ�ߡ���� RTH �����ֱ����ߵ�Դ���� fc�����ڸ���˲̬ʱ���� VOUT ���³� / ���塣Ȼ������� RTH ̫��Դ���� fc ���ܹ��ߣ���λԣ�ȾͲ����ˡ�
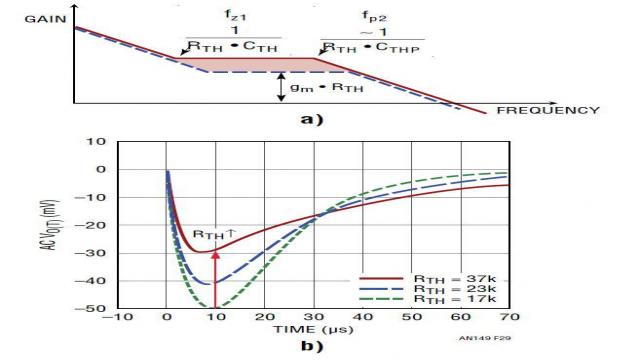
ͼ 29��RTH ��ת�ƺ�������˲̬��Ӱ��
3) CTHP �Ը��ؽ�Ծ˲̬��Ӱ�졣ͼ 30 ��ʾ��CTHP Ӱ�켫�� fp2 ��λ�á�CTHP ����ȥ������������� ITH ���ŵĿ���������������ȼ�С���ض����������Դ���� fc > fp2����ô CTHP �Ը���˲̬Ӱ��Ͳ�̫����� CTHP ��ƹ��ȣ����� fp2 ���� fc����ô���Ϳ��ܼ�С��������λԣ�ȣ�����˲̬�³� / ��������
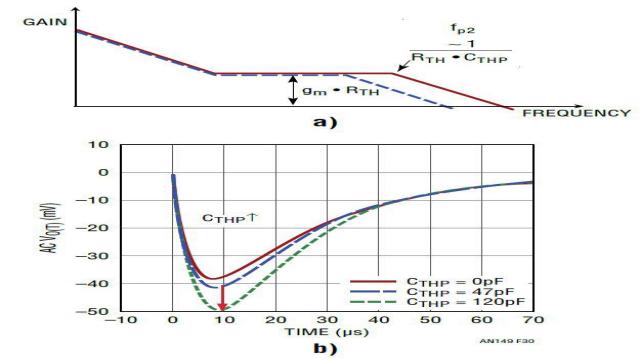
ͼ 30��CTHP ��ת�ƺ�������˲̬��Ӱ��
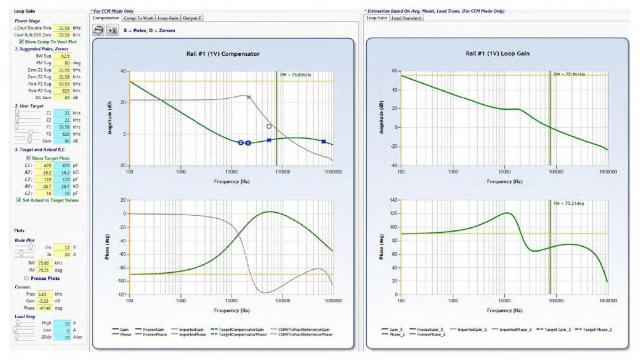
�� LTpowerCAD ��ƹ������һ������ģʽ��Դ
ͨ�� LTpowerCAD ��ƹ��ߣ��û����Էdz�������ƺ��Ż��������ص���ģʽ��Դ�Ļ�·����������˲̬���ܡ��ܶ��������ز�Ʒ�������价·����ȷ�ؽ�ģ�����ȣ��û���Ҫ����ƹ��ʼ�������һ����������Ҫ��Ƶ���������磬ȷ��Ϊ IC �ṩ�㹻�� AC ����źš�֮���ڻ�·���ҳ�棬�û�����ͨ�������ƶ����������۲����廷·��������λԣ�Ⱥ���Ӧ�ĸ���˲̬���ܣ����˵��ڻ�·���� R/C ֵ����һ����ѹ��ת�������ԣ��û�ͨ����Ҫ��Ƶ��� 1/6 fSW �Ĵ����������� 45�� (�� 60��) ����λԣ�ȣ��� ½ fSW �������� 8dB �����廷·����˥������һ����ѹ��ת�������ԣ����ڴ����Ұ�ƽ����� (RHPZ)�������û���Ҫ��Ƶ��������� RHPZ Ƶ�� 1/10 �ĵ�Դ������LTpowerCAD ����ļ���������� LTspice ����ʵʱ���棬�Լ����ϸ�ĵ�Դ��̬���ܣ����縺��˲̬���ӵ� / �ϵ硢�������� �� �ȵȡ�
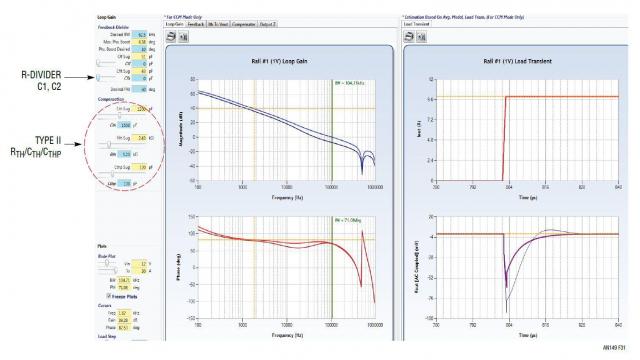
ͼ 31��LTpowerCAD ��ƹ������˻�·������ƺ�˲̬�Ż�����
������Դ��·����
LTpowerCAD �� LTspice ����������ȡ����ʵ��Դ�����չ���̨��·����������ڽ����Ͷ����������֮ǰ�������б�Ҫ���в��������ܵ�Դģ������������ȷ��������Щģ�Ͳ�����ȫ�濼�ǵ���·�����Ժ���������ԣ���������������� ESR �仯��������͵������ķ����� �� �ȵȡ����⣬��· PCB ���������IJ���ȷ�Ȼ�������������������Ϊʲô��ʱ����ģ�ͺͲ�������������ܴ��ԭ����������������������˲̬���ԾͿ���������һ��ȷ�ϻ�·�ȶ��ԡ�
ͼ 32 ��ʾ����Ƶ�ʷ�����ϵͳ����һ���Ǹ���ʽ��Դ�ĵ��͵�Դ��·����IJ������á�Ϊ�˲�����·���棬�ڵ�ѹ������·�в�����һ�� 50�� �� 100�� �ĵ��裬�������������������һ�� 50mV ����ʽ AC �źš�ͨ�� 2 ���ӵ������ѹ��ͨ�� 1 ���ӵ��������������һ�ࡣ��·������Ƶ�ʷ�����ϵͳͨ�� Ch2/Ch1 ���㡣ͼ 33 ��ʾ�˲�õĺ� LTpowerCAD ����ó��ĵ��͵���ģʽ��Դ LTC3851A ֮��·����ͼ���ڹؼ��� 1kHz �� 100kHz Ƶ�ʷ�Χ�ڣ����������Ǻϵ÷dz��á�
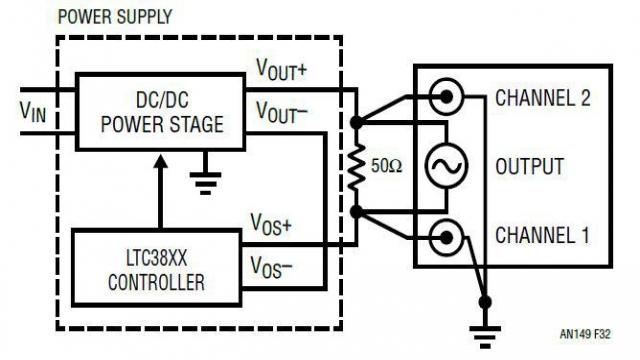
ͼ 32��������Դ��·����IJ�������
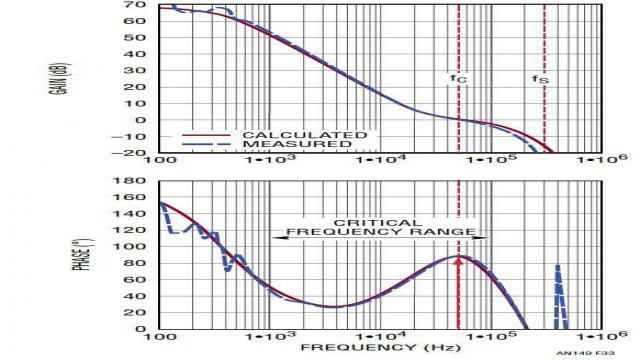
ͼ 33����õĺ� LTpowerCAD ��ģ�õ��ĵ���ģʽ��ѹ��ת����֮��·����
�������²��ȶ��Ե�����
����������
�����ʾ�����ϵ�Դ���ػ������ѹ���ο��������ȶ����ж�������ô���ȣ��û���Ҫȷ����Դ������̬�����¹����ģ�û�и��ػ������ѹ˲̬�����ڷdz�С��dz����ռ�ձ�Ӧ�ö��ԣ��������������Ծ����ģʽ����Ҫ����Ƿ�ﵽ����̽�ͨʱ���Ͽ�ʱ�����ơ�������Ҫ�ⲿͬ���źŵĵ�Դ���ԣ�Ҫȷ���źŸɾ���λ�ڿ��������ݱ����������Է�Χ֮�ڡ���ʱ���б�Ҫ������� (PLL) �˲������硣
��������źź�������
�ڵ���ģʽ��Դ�У�Ϊ������ȵؽ��ͼ��������Ĺ�����ģ�����������ѹһ��dz��͡����磬LTC3851A ������ 50mV ������ѹ��PCB �����п��ܸ��ŵ�����·�������¿��ر��ֲ��ȶ���Ϊ��ͨ��������ȷ���Ƿ�ȷʵ�ǻ�·�������⣬������ ITH ���ŵ� IC ��֮�����һ������ 0.1µF ��������������������������Դ��Ȼ���ȶ�����ô��һ�����Ǽ����Ʒ�����һ����ԣ�������͵����������Ӧ����Ƴɣ��� IC ������������������� 10mV �� 15mV ��ֵ����ֵ AC ����������źš����⣬����������߿�����һ��Ť�ʿ�������²��裬�Լ�������Ƿ��ܽ�����⡣
���� PCB ���ֶ��ԣ���һЩ��Ҫ�������� [6]����֮��ͨ����Ҫ��һ�Խ����Ų��衢���� SENSE+ �� SENSE- ���ŵĵ����������ʵ�ֿ����ļ�⡣���ij�� PCB ͨ������ SENSE- ���У���ôҪȷ�����ͨ�ײ��Ӵ������� VOUT ƽ�档��� SENSE+ �� SENSE- ���˲���������Ӧ��ͨ��ֱ���������ӣ������ھ����ܿ��� IC ���ŵĵط�����ʱ��Ҫ�˲�����������������Щ������Ҳ���뿿�� IC��
����оƬ��������벼�֣�
���� IC ��Χ����ķ��úͲ���Ҳ��������Ҫ�� [6]��������ܣ������մ�ȥ���������Ӧ�ÿ��������š�������Ҫ���ǣ�ITH ���ŵ����� Cthp Ҫ�����ܿ��� ITH �� IC �źŵ����š����� IC Ӧ�ôӹ����Դ�� (PGND) ��һ���������źŵ� (SGND)�����ؽڵ� (���� SW��BOOST��TG �� BG) Ӧ��Զ�����е�С�źŽڵ� (���������⡢������ ITH ��������)��
�ܽ�
���ڿ���ģʽ��Դ���ԣ����dz�����Ϊ��·���������һ�����ս�Ե������ھ߿���˲̬Ҫ���Ӧ�ö��ԣ���ƾߴ�����ͳ����ȶ���ԣ�ȵĵ�Դ�Ƿdz���Ҫ�ġ���ͨ����һ���dz���ʱ�Ĺ��̡����Ľ�����һЩ�ؼ��������ϵͳ����ʦ�˽���������ʹ�� LTpowerCAD ��ƹ��߿ɽ���Դ��·��ƺ��Ż���üöࡣ
|

